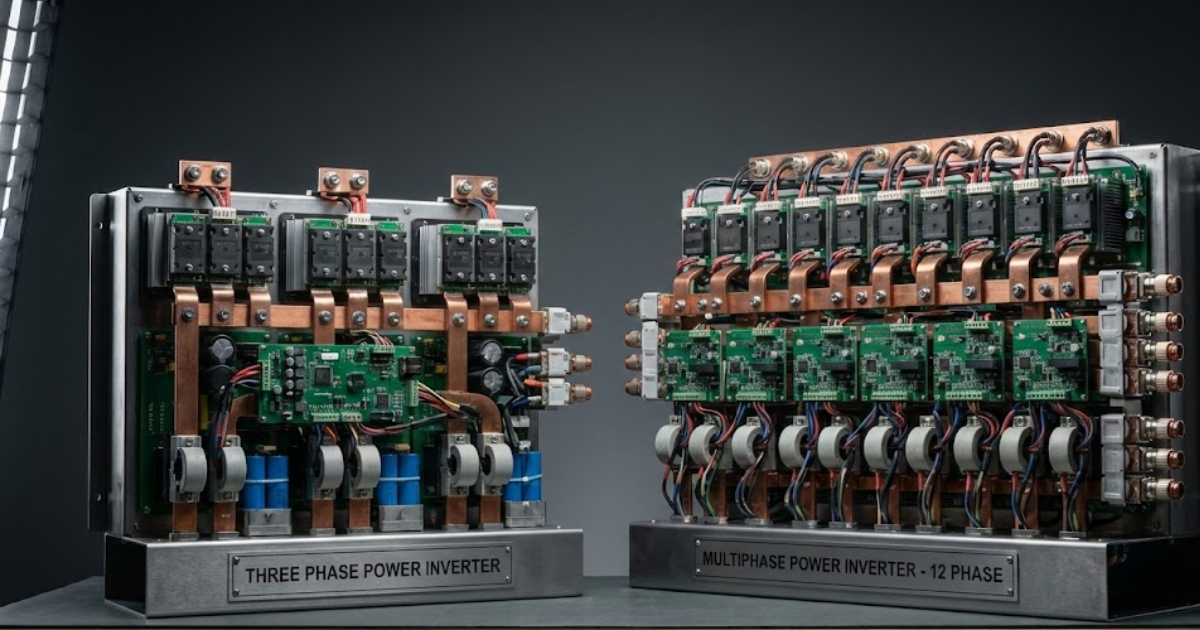
Mehrphasenmotoren versus Drehstrommotoren für hochzuverlässige Systeme
02 / 20 / 2026

Wichtigste Erkenntnisse
- Definieren Sie zunächst die Fehlerbetriebsziele, insbesondere das Mindestdrehmoment, die zulässige Welligkeit und die Missionszeit, und wählen Sie dann die Phasenzahl, mit der diese Ziele mit einer gewissen Sicherheitsmarge erreicht werden können.
- Vergleichen Sie Mehrphasen- und Dreiphasenoptionen anhand des Fehlerverhaltens und des Verifizierungsumfangs und nicht anhand der Spitzenleistung, da Isolierung, thermische Grenzen und stabile degradierte Modi die tatsächliche Zuverlässigkeitsgrenze bestimmen.
- Motor, Wechselrichter, Steuerungen und Teststrategie als ein Paket sperren, damit Redundanzgewinne nachweisbar, wiederholbar und über den gesamten Sicherheitsfall hinweg wartbar sind.
Wählen Sie die Anzahl der Motorphasen basierend darauf, wie viel Drehmomentverlust Sie bei Störungen akzeptieren können.
Motorbetriebene Systeme verbrauchen etwa 70 % des industriellen Stroms in den Vereinigten Staaten, sodass ein Motorausfall oder eine Leistungsminderung oft zu Produktionsausfällen und Terminverzögerungen führt. Hohe Zuverlässigkeit beginnt mit einer klaren Definition dessen, was „noch funktioniert” nach einer Störung bedeutet. Diese Definition bestimmt den Motor, den Umrichter, die Steuerungen und den Testplan, lange bevor hardware .
Bei der Auswahl zwischen Mehrphasen- und Drehstrommotoren geht es weniger um Spitzenleistung als vielmehr um kontrollierten Leistungsabfall. Eine Drehstrommaschine kann äußerst zuverlässig sein, wenn das System einen Ausfall und Neustart toleriert. Eine Mehrphasenmaschine bewährt sich, wenn Drehmoment, Drehzahl oder Steuerbarkeit nach einem Stromausfall aufrechterhalten werden müssen.
Beginnen Sie mit Zuverlässigkeitszielen und zulässigem Drehmomentverlust.
Legen Sie ein messbares Ziel für den Fehlerbetrieb fest und ordnen Sie es dann der Phasenzahl zu. Beginnen Sie mit dem minimalen Drehmoment und der minimalen Drehzahl, die Sie nach einem einzelnen Fehler aufrechterhalten müssen, der maximalen Zeit, die Sie diese aufrechterhalten müssen, und dem thermischen Spielraum, den Sie dafür nutzen können. Diese drei Werte unterscheiden schnell zwischen „Ride-Through”-Konstruktionen und „Safe Stop”-Konstruktionen.
Formulieren Sie das Ziel in Anforderungen, die ein Prüfstand erfüllen oder nicht erfüllen kann. Sie benötigen klare Zahlen für das konstante Drehmoment, die Drehmomentwelligkeit und die Wiederanlaufzeit sowie eine Definition dessen, was „Fehler“ in Ihrem Sicherheitsfall bedeutet. Wenn Sie einen kontrollierten Stopp akzeptieren können, ist Dreiphasen in der Regel der einfachste Weg. Wenn Sie den Betrieb aufrechterhalten müssen, ist Mehrphasen leichter zu rechtfertigen, da die Redundanz in die Drehmomentproduktion integriert ist.
„Bei der Wahl zwischen Mehrphasen- und Dreiphasenmotoren geht es weniger um Spitzenleistung als vielmehr um kontrollierte Leistungsminderung.“
8 Kriterien für die Auswahl von Mehrphasen- oder Dreiphasenmotoren

1) Fehlertoleranz bei offenem Stromkreis und verbleibende Drehmomentkapazität
Eine offene Phase ist der am einfachsten zu erklärende Fehler und wird oft zum Maßstab für Behauptungen wie „weiterlaufen lassen“. Ein Drehstrommotor verliert einen Großteil seines Drehmoments und erwärmt sich ungleichmäßig, wenn Sie versuchen, eine Last auf zwei Phasen zu übertragen. Ein Mehrphasenmotor verteilt das Drehmoment auf mehr Phasen, sodass bei Ausfall einer Phase ein höherer nutzbarer Drehmomentanteil und eine gleichmäßigere Leistungsreduzierung verbleiben. Ein konkreter Fall ist hilfreich, wenn Sie Ziele festlegen, z. B. einen elektromechanischen Aktuator in einem Flugzeug, der nach einem einphasigen Ausfall seine Position halten und sich dennoch mit reduzierter Geschwindigkeit bewegen muss. Der Wert ist kein magisches Drehmoment, sondern ein kontrolliertes Drehmoment mit vorhersehbaren Grenzen, das Sie zertifizieren und testen können.
2) Kurzschlussverhalten und Optionen zur Fehlerisolierung
Ein Phasenschluss ist schwieriger als ein Phasenausfall, da der Strom schnell ansteigen kann und der Fehler auf benachbarte Phasen übergreifen kann. Dreiphasensysteme basieren in der Regel auf einer schnellen Strombegrenzung, Abschaltung und Isolierung am Wechselrichter oder einer vorgeschalteten Schutzvorrichtung. Mehrphasensysteme bieten Ihnen mehr Möglichkeiten, die Drehmomentproduktion umzuleiten, jedoch nur, wenn das Design eine klare Isolierungsmethode umfasst, damit der Kurzschlusspfad nicht zu Verlusten und Wärmeentwicklung führt. Achten Sie darauf, wo die Isolierung stattfindet – an den Motoranschlüssen, im Wechselrichter oder über Schütze – und wie schnell sie wirkt. Die beste Wahl ist eine Lösung mit einer definierten sicheren Reaktionszeit und einem bekannten Betriebspunkt nach einem Fehler. Wenn die Isolierung langsam oder ungewiss ist, können zusätzliche Phasen das System nicht retten.
3) Drehmomentwelligkeit, Vibration und akustische Grenzwerte bei Störungen
Ein fehlerhafter Betrieb kann das Drehmoment erreichen und dennoch zu einem Ausfall Ihres Systems führen, wenn es zu Schwankungen und Vibrationsspitzen kommt. Die Zweiphasenleitung in einer Dreiphasenmaschine kann ein starkes pulsierendes Drehmoment erzeugen, das direkt auf Getriebe, Kupplungen und Lager übertragen wird. Die Mehrphasensteuerung kann die verbleibenden Phasenströme so formen, dass die Welligkeit reduziert wird, aber Sie müssen dieses Verhalten über Drehzahl und Last hinweg überprüfen, nicht nur an einem Betriebspunkt. Vibrationen sind wichtig, weil sie bestehende mechanische Risiken verstärken und Lager oft als erste den Preis dafür zahlen. Lagerbezogene Probleme machen etwa 51 % der Ausfälle von Induktionsmotoren aus, wie aus einer häufig zitierten Feldstudie hervorgeht. Wenn Ihre Zuverlässigkeitsanforderungen hoch sind, sollten Sie die Welligkeitskontrolle als primäre Anforderung und nicht als Detail der Feinabstimmung betrachten.
4) Anzahl der Wechselrichter-Phasen, Risiko der Gate-Ansteuerung und Anzahl der Bauteile
Mehr Phasen bedeuten in der Regel mehr Wechselrichterstränge, mehr Gate-Treiber, mehr Strommessungen und mehr Verbindungen. Diese zusätzliche hardware die Fehlerabdeckung verbessern, erhöht jedoch auch die Anzahl der Bauteile und den Testumfang. Dreiphasen-Wechselrichter sind ausgereift, kompakt und weit verbreitet, was das Integrationsrisiko senkt und die Ersatzteilbeschaffung vereinfacht. Mehrphasige Wechselrichter erfordern einen durchdachten Ansatz für Einzelpunktfehler, z. B. wie sich ein Gate-Treiberfehler verhält und wie man ihn erkennt, bevor er zu einem zerstörerischen Ereignis wird. Suchen Sie nach Architekturen, die in einen bekannten Zustand versagen und nicht einfach nur „ausgeschaltet“ sind. Der praktische Kompromiss ist klar: Mehrphasige Systeme bieten elektrische Redundanz, während dreiphasige Systeme hardware und bewährte Lieferketten bieten.
5) Komplexität der Steuerung, Erfassung von Anforderungen und sichere Notfallmodi
Phasenredundanz ist nur dann hilfreich, wenn das Steuerungssystem sie sicher nutzen kann. Die Dreiphasensteuerung ist gut verstanden, und ein sicheres Stoppverhalten ist einfach zu implementieren und zu überprüfen. Die Mehrphasensteuerung fügt Stromzuweisungsoptionen, Fehlererkennungslogik und ein Verhalten im degradierten Modus hinzu, das unter Sensorfehlern und Timing-Jitter stabil bleiben muss. Ihr Sensorplan ist genauso wichtig wie der Algorithmus, da der Verlust eines Stromsensors wie der Verlust einer Phase aussehen kann, wenn Sie nicht dafür ausgelegt sind. Definieren Sie degradierte Modi explizit, einschließlich der Punkte, deren Steuerung Sie einstellen, die Sie klemmen und die Sie weiterhin regulieren. Je komplexer der degradierte Modus ist, desto mehr sollten Sie in automatisierte Tests Fehlerinjektion investieren.
6) Effizienz, Kupferverlust und thermische Reserve bei hoher Last
Hochzuverlässige Designs arbeiten in der Regel mit thermischem Spielraum, und die Phasenanzahl bestimmt, wie Sie diesen nutzen. Eine mehrphasige Wicklung kann den Strom pro Phase bei gleicher Leistung reduzieren, was unterstützen der Dimensionierung der Leiter und der Hotspot-Kontrolle unterstützen kann, aber der Gesamtkupferverlust hängt immer noch davon ab, wie Sie den Strom verteilen und wie die Wicklung aufgebaut ist. Dreiphasige Maschinen punkten oft durch ihre Einfachheit und optimierte Fertigung, was zu einer hohen Grundeffizienz und vorhersagbaren thermischen Modellen führen kann. Der entscheidende Punkt ist das thermische Verhalten im Fehlerfall, nicht nur die Nennleistung. Wenn Sie nach einem Phasenausfall weiterarbeiten müssen, stellen Sie sicher, dass die verbleibenden Phasen während der gesamten Einsatzzeit innerhalb der Isolationsgrenzen bleiben. Oft ist nicht das Drehmoment, sondern die Wärme der begrenzende Faktor für einen beeinträchtigten Betrieb.
7) EMI, Oberschwingungen und Filterdimensionierung für Tests
Die Phasenanzahl verändert Ihre Schaltmusteroptionen, was sich wiederum auf die leitungsgebundenen und abgestrahlten Störsignale auswirkt. Dreiphasige Antriebe verfügen über bekannte Filterkonzepte, während Mehrphasensysteme zusätzliche Oberschwingungen verursachen können, wenn die Schaltstrategie nicht unter Berücksichtigung der Konformitätsgrenzen geplant wird. Mehr Wechselrichterstränge bedeuten auch mehr Kanten und mehr Kopplungspfade, was die Erdung und die Kabelverlegung erschweren kann. Sie sollten EMI als eine Systemeigenschaft betrachten, die den Motor, den Wechselrichter, den Kabelbaum und das Gehäuse umfasst, und nicht als ein Filterproblem in der Endphase. Wenn Tests ein Zeitplanrisiko Tests , ist die konservative Wahl die Architektur mit den geringsten Unbekannten hinsichtlich Schaltverhalten und Kabelkopplung. Mehrphasige Systeme können dennoch problemlos bestehen, erfordern jedoch disziplinierte Layoutregeln und frühzeitige Messungen.
8) Verifizierungsaufwand einschließlich HIL-Abdeckung und Sicherheitsanforderungen
Der Unterschied in den Entwicklungskosten zeigt sich oft in der Verifizierung und nicht in hardware. Die Behandlung von Dreiphasenfehlern kann mit einer kleineren Anzahl von Szenarien validiert werden, da es weniger degradierte Zustände gibt und diese leichter zu begrenzen sind. Die Mehrphasenfehlertoleranz erhöht die Anzahl der zu testenden Zustände, da Sie den fortgesetzten Betrieb über verschiedene ausgefallene Phasen, Sensor-und Datenfusion sowie Schaltgeräte hinweg validieren. Tests werden wichtiger, da Sie eine wiederholbare Fehlerinjektion ohne Risiko für Prototypen benötigen und Timing-Details bei der Strombegrenzung und dem Moduswechsel eine Rolle spielen. Teams verwenden häufig die Echtzeitsimulation von OPAL-RT, um diese Fehlerkampagnen frühzeitig durchzuführen und die software bei hardware software zu halten. Wenn Ihr Sicherheitsnachweis den Nachweis eines kontrollierten degradierten Betriebs erfordert, planen Sie die Verifizierung als vorrangige Anforderung und nicht als nachgelagerte Aufgabe.
| Kriterium | Was Sie daraus lernen |
|---|---|
| 1 Fehlertoleranz bei offenem Stromkreis und verbleibende Drehmomentkapazität | Sie wissen, wie viel Drehmoment nach dem Öffnen einer Phase verbleibt. |
| 2 Kurzschlussverhalten und Möglichkeiten zur Fehlerisolierung | Sie bestätigen die Isolationsgeschwindigkeit und den sicheren Betrieb nach einem Fehler. |
| 3 Drehmomentwelligkeit, Vibration und akustische Grenzwerte bei Fehlern | Sie werden sehen, ob ein verringertes Drehmoment schädliche Vibrationen verursacht. |
| 4 Anzahl der Wechselrichter-Phasen, Risiko der Gate-Ansteuerung und Anzahl der Teile | Sie werden Redundanz gegen Teile und Fehlerquellen abwägen. |
| 5 Komplexität der Steuerung, Erfassung von Anforderungen und sichere Notfallmodi | Sie beurteilen, ob die Steuerungen bei Fehlern stabil bleiben. |
| 6 Effizienz, Kupferverlust und thermische Reserve bei hoher Last | Sie erfahren, ob Hitze die Betriebszeit beeinträchtigt. |
| 7 EMI, Oberschwingungen und Filterdimensionierung für Tests | Sie schätzen das Compliance-Risiko durch Umschalten und Verkabelung ein. |
| 8 Verifizierungsaufwand einschließlich HIL-Abdeckung und Sicherheitsanforderungen | Sie werden den Umfang der Testkampagne festlegen, die für den Nachweis der Sicherheit erforderlich ist. |
„Behandeln Sie die Phasenanzahl, die Wechselrichterarchitektur und die Fehlerprüfungsabdeckung als ein Gesamtpaket, sonst zahlen Sie später für Nachbesserungen und späte Überraschungen.“
Motorphasen, Wechselrichterauslegung und Teststrategie abgleichen
Die beste Wahl hinsichtlich Zuverlässigkeit ist diejenige, die Sie unter strengen Fehlerbedingungen spezifizieren, aufbauen und nachweisen können. Dreiphasig ist die richtige Wahl, wenn Ihr System einen Stopp, Neustart oder eine Umschaltung tolerieren kann, da die hardware Verifizierungspfade gut erprobt sind. Mehrphasige Systeme sind die richtige Wahl, wenn Sie nach einem einzelnen elektrischen Fehler ein kontrolliertes Drehmoment aufrechterhalten müssen, da Redundanz zwar vorhanden ist, die Verifizierungsarbeit jedoch aufwändiger ist. Behandeln Sie die Phasenanzahl, die Wechselrichterarchitektur und die Fehlerprüfungsabdeckung als ein Gesamtpaket, sonst müssen Sie später für Nacharbeiten und späte Überraschungen bezahlen. OPAL-RT ist die natürliche Wahl, wenn Sie eine wiederholbare Fehlerinjektion und eine zeitgenaue Closed-Loop-Validierung benötigen, bevor die volle Leistungsstufe gesperrt wird.
Echtzeitlösungen für alle Branchen
Entdecken Sie, wie OPAL-RT die weltweit fortschrittlichsten Branchen verändert.

Energiesysteme
25.07.2026
Warum Distanzschutzrelais unter realen Fehlerbedingungen falsch auslösen
In diesem Beitrag wird erläutert, warum Fernschutzrelais bei Fehlerwiderständen, Einspeisungen aus dem Netz, transienten Zuständen bei kapazitiven Spannungswandlern und starken Lastwechseln eine falsche Reichweite aufweisen und wie simulationsbasierte Tests die Zonenreichweite vor der Inbetriebnahme Tests .

Energiesysteme
23.07.2026
Automatisierung von Tests zur Einhaltung der Netzvorschriften Tests Wechselrichter-basierte Anlagen
Tests der Netzkodekonformität Tests Wechselrichteranlagen stützt sich auf Studien zu schwachen Netzen, festgelegte Störungsdefinitionen, wiederholbare, vorab festgelegte Abläufe und strukturierte Nachweise für das Bestehen bzw. Nichtbestehen der Prüfung.

Leistungselektronik
22.07.2026
Tests die Tests Steuerung auf ihre Sicherheit, bevor hardware angeschlossen wird
Auf dieser Seite wird erläutert, wie Fehlerinjektion, Regelkreismodelle und Wiederherstellungsprüfungen unterstützen , die Steuerung von Umrichtern vor hardware unterstützen .