Beherrschung von Kfz-Simulationswerkzeugen für die Entwicklung autonomer Fahrzeuge
Automobilindustrie
08 / 05 / 2025

Ihr nächster autonomer Prototyp verdient es, mit absolutem Vertrauen die Werkstatt zu verlassen. Diese Gewissheit erhalten Sie durch umfassende Simulationen, lange bevor die Räder den Asphalt berühren. Hardware(HIL) -Bänke und physikreiche virtuelle Strecken decken Vorteil früher auf, verkürzen die Integrationszeit und verringern kostspielige Rückrufe. Um jedoch zuverlässige, wiederholbare Ergebnisse zu erzielen, müssen die Werkzeuge mit den steigenden Anforderungen an die Wahrnehmung und den strengen Sicherheitsstandards Schritt halten.
Jüngste Durchbrüche in der Grafikverarbeitung, bei feldprogrammierbaren Gate-Arrays und maschinellem Lernen haben die Entwicklungszeiten von Fahrzeugen neu gestaltet. Teams können nun Sensor-und Datenfusion, Entscheidungslogik und Aktuatoren in einer einheitlichen digitalen Umgebung schneller als in Echtzeit bewerten. Diese Vorteile sind jedoch nur dann von Bedeutung, wenn die Plattform, die hardware und die Arbeitsabläufe mit den täglichen technischen Zwängen übereinstimmen. Dieser Leitfaden vermittelt praktische Einblicke in die Auswahl, Integration und Skalierung von Simulationstools für die Automobilindustrie, damit Sie schneller sicheren Code liefern können.
Warum Tests in Automobilsystemen Zeit sparen und die Validierung verbessern
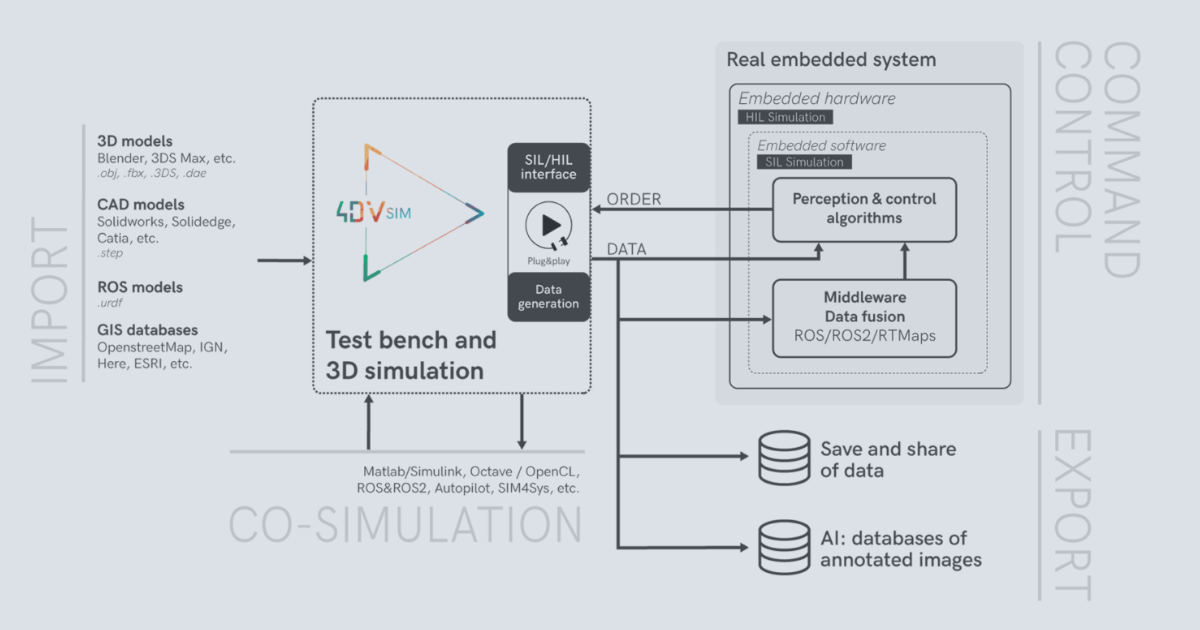
Tests in Automobilprojekten ersetzen teure Straßenprototypen durch einen Prüfstand, der elektronische Steuergeräte mit einem Echtzeit-Anlagenmodell verbindet. Anstatt wochenlang auf den Bau eines Prototyps zu warten, laden Sie die Steuerungs-Firmware auf den Prüfstand und fahren in wenigen Minuten virtuelle Kilometer. Da das Anlagenmodell deterministisch neben der Steuerung läuft, werden Fehler bei Bedarf reproduziert und ohne mehrdeutige Trace-Daten protokolliert. Frühzeitige Fehler, die durch Tests in automobilen Arbeitsabläufen erkannt werden, verkürzen die Verifizierungszyklen in der Regel um 30 Prozent, so dass Sie mehr Zeit für die Kalibrierung und Zertifizierung haben. Kürzere Zyklen bedeuten weniger Änderungsaufträge, kleinere Prototypenflotten und eine stärkere statistische Abdeckung, bevor eine einzelne Teststrecke gebucht wird.
Die Zeitersparnis allein rechtfertigt die Investition in HIL nicht, wenn nicht auch die Validierungstiefe verbessert wird. Ein Prüfstand ermöglicht eine Fehlerinjektion, die weit über das hinausgeht, was die Vorschriften für den öffentlichen Straßenverkehr zulassen, so dass Ihr Team Neustarts, Spannungseinbrüche oder gefälschte Sensorframes in aller Sicherheit bewerten kann. Durch die Verknüpfung desselben Anlagenmodells mit Ihrer softwarewird sichergestellt, dass die Eingaben in den frühen Algorithmus-Sprints mit denen in der Endabnahme übereinstimmen, was die Rückverfolgbarkeit verbessert. Die durchgängige Verbindung von Model-in-the-Loop zu HIL verkürzt die Ursachenanalyse und senkt sowohl die Kosten als auch das Risiko für komplexe elektrische und autonome Programme.
Vorteile der Kombination von Tests in der Automobilindustrie mit KI-basierten Ansätzen
Künstliche Intelligenz bringt die Fähigkeit zur Mustererkennung in Prüfstände ein, die sich bereits durch deterministische I/O auszeichnen. Durch die Kombination dieser beiden Komponenten können Sie erstaunlich große Parameterbereiche ohne manuelle Skripterstellung durchsuchen. Das Ergebnis sind mehr beobachtete Fehler pro Stunde und eine größere Abdeckung von Situationen, die Ingenieur:innen bei herkömmlichen Prüfungen nie in Betracht ziehen würden. Bevor Sie sich mit den spezifischen Vorteilen befassen, sollten Sie sich ansehen, wie statistische Inferenz, Reinforcement Learning und adaptives Sampling die Tests für Kraftfahrzeuge ergänzen.
- Schnellere Fehlererkennung: Maschinell lernende Klassifikatoren beobachten Signalverläufe in Echtzeit und erkennen Anomalien innerhalb von Millisekunden, so dass Ingenieur:innen sich nicht mehr mit umfangreichen Protokolldateien herumschlagen müssen. Das Ranking der Klassifikatoren hilft dabei, Prioritäten bei der Fehlerbehebung zu setzen, damit sich das Team zuerst um die wichtigsten Probleme kümmert.
- Generierung von Szenarien in großem Maßstab: Generative Modelle schlagen Tausende von seltenen Verkehrsszenen vor, die noch der Physik gehorchen, und speisen sie direkt in die HIL-Bench ein. Diese Bandbreite setzt die Sensorpipelines Gefahren aus, die nur selten auftreten, wie z. B. teilweise verdeckte Beschilderungen oder unberechenbare Fußgänger.
- Adaptive Testsequenzierung: Verstärkungsagenten lernen, welche Eingabekombinationen am ehesten zu Steuerungsregressionen führen, so dass der Prüfstand die Laufzeit dort einsetzen kann, wo es am wichtigsten ist. In den Nächten und an den Wochenenden verfeinert der Agent seine Strategie, sodass die Prüfungen am Montag immer mit neuen, hochwertigen Daten beginnen.
- Vorausschauende Wartung des Labors: Neuronale Netze untersuchen die Spannungs- und Temperaturtelemetrie von Lastkästen und warnen das Laborpersonal, bevor Relais oder Leistungsstufen aus der Toleranz geraten. Diese Voraussicht bewahrt die Messgenauigkeit und reduziert ungeplante Ausfallzeiten.
- Automatische Beschriftung von Sensorausgaben: Bildverarbeitungs-Transformatoren kommentieren semantische Segmente in synthetischen Kamerabildern, die vom Grafik-Cluster gestreamt werden, und reduzieren so die Zeit für die menschliche Beschriftung drastisch. Präzise Beschriftungen beschleunigen die Validierung von Wahrnehmungsstapeln, wenn sie mit LiDAR- und Radaremulationen kombiniert werden.
- Probabilistische Sicherheitsmetriken: Bayes'sche Schätzer wandeln rohe Simulationszähler in strukturierte Risikomarker um, die mit ISO 26262 und UL 4600 Audits übereinstimmen. Die Prüfer können dann nachvollziehen, wie jede Kennzahl aus einer wiederholbaren KI-gesteuerten Kampagne und nicht aus handverlesenen Szenarien entstanden ist.
Die Kombination von datenintensiven Lernalgorithmen mit zeitdeterministischen HIL-Bänken erhöht sowohl die Geschwindigkeit als auch die Tiefe der Validierung. Anstatt sich zwischen statistischer Breite und elektrischer Genauigkeit entscheiden zu müssen, können Sie beides in einem einheitlichen Arbeitsablauf sicherstellen. Dank dieser Synergie können sich erfahrene Ingenieur:innen auf Architekturentscheidungen konzentrieren, während automatische Agenten über Nacht die schwere Arbeit übernehmen. Mehr abgedeckte Risikokategorien bedeuten weniger Überraschungen bei Tests, reibungslosere Zertifizierungsgespräche und kürzere Wege zur Marktreife.
Kürzere Zyklen bedeuten weniger Änderungsaufträge, kleinere Prototypenflotten und eine stärkere statistische Erfassung vor der Buchung einer einzelnen Teststrecke.
Wichtige Anwendungsfälle für Tests in der Automobilindustrie über alle Simulationsstufen hinweg
HIL-Bänke sind während des gesamten Entwicklungslebenszyklus von Vorteil, nicht nur bei der abschließenden Validierung. Jede Phase profitiert davon, wenn das gleiche Anlagenmodell die nächste Reihe von Designfragen speist. Durch die Kontinuität wird die Nachbearbeitung von Daten vermieden und die Leitung erhält eine klare Sichtlinie von den Anforderungen zu den Metriken. Teams verankern oft Budgets, sobald sie sehen, wie ein einziger Prüfstand Fragen beantwortet, die normalerweise mehrere Labore betreffen.
Frühe Modellierung von Konzepten
In der Skizzenphase wollen Ingenieur:innen den Nachweis erbringen, dass sich High-Level-Regelungstheorien unter physikalischen Bedingungen verhalten. Ein schnelles HIL-Setup mit groben Anlagenblöcken erzeugt Verzögerungs- und Sättigungsprofile, die in reinen softwarenicht sichtbar sind. Diese Profile geben Aufschluss über anfängliche Anforderungsspannen, bevor die hardware eskalieren. Da Tests im Automobilkontext bereitsHardware-Kommunikationspfade umfassen, werden bei frühen Konzeptentscheidungen Buslatenzen berücksichtigt, die sonst erst Monate später auftreten würden.
Mit dem Prüfstand werden auch Datenformate fest kodiert, die während des gesamten Programms erhalten bleiben. Wenn Ihr Team später die Anlagentreue verfeinert, bleibt der Schnittstellencode unangetastet, sodass der Zeitplan eingehalten wird. Der Ansatz minimiert schmerzhafte Refactors, sobald die Lieferanten aktualisierte Komponentenmodelle liefern. Die Stakeholder wissen es zu schätzen, dass frühzeitige Investitionen in den Prüfstand die Designabweichung stoppen, anstatt zusätzlichen Aufwand zu verursachen.
Reifung von Algorithmen
Sobald die Steuergesetze kompiliert sind, verlagert sich der Schwerpunkt auf Stabilität und Robustheit über ein breites Spektrum von Fahrzeugzuständen. Bei HIL-Tests werden Störungen wie Reifenschlupf, elektrische Restwelligkeit oder Temperaturschwankungen der Batterie berücksichtigt, während der Zeitplan deterministisch bleibt. Der deterministische Zeitplan ist wichtig, da Jitter Eigenwertprobleme verbirgt, die nur bei präzisen Abtastabweichungen auftreten. Mit Tests können Sie die Abtastzeit, den Solverschritt und die Quantisierung in sicherer Isolierung von zufälligen Netzwerkaktivitäten optimieren.
Ingenieur:innen iterieren durch Gain Scheduling Maps viel schneller, als es Track Sessions erlauben. Versionskontrollwerkzeuge protokollieren jeden Durchlauf, so dass die Regressionstriage einfach bleibt. Die automatische Erstellung von Berichten verknüpft numerische Margen mit Anforderungsbezeichnern, was die Freigabe durch die Beteiligten vereinfacht. Diese Artefakte dienen später bei Audits der funktionalen Sicherheit als Nachweis für Sicherheitsfälle.
Integration des Antriebsstrangs
Elektrische Antriebsstränge bringen Stromschleifen mit hoher Bandbreite mit sich, die herkömmliche Karosseriesteuerungsnetze destabilisieren können. Ein Prüfstand koppelt Mikrosekunden des Steuergeräts an elektrische Milligrade der Maschine und bewahrt Partnerschaften , die in Offline-Studien unerreichbar sind. Diese Genauigkeit bestätigt die Isolationskoordination, Fehlerüberbrückungsstrategien und Wärmebudgets, bevor die Prüfstandszeit gebucht wird. Das Ergebnis ist eine Konsolidierung von Integrationsmeilensteinen in den Bereichen Antrieb, Karosserie und Infotainment.
Benchmark-Daten helfen auch bei Verhandlungen mit Lieferanten. Harte Simulationsnachweise unterstützen Anträge auf Firmware-Updates für Wechselrichter oder verbesserte Kabelbäume. Zulieferer reagieren schneller, wenn sie strukturierte Protokolle statt anekdotischer Berichte erhalten. Die Programmmanager sehen weniger Aktualisierungszyklen, sobald die physischen Prototypen das Testgelände erreicht haben.
Stresstests für die Sensorfusion
Moderne Fahrerassistenzsysteme und autonome Systeme basieren auf der multimodalen Fusion von LiDAR-, Radar-, Ultraschall- und Kameraströmen. Wenn diese Kanäle in einer geschlossenen hardware mit dem Controller betrieben werden, lassen sich Pufferungsengpässe und Speicherdruck frühzeitig erkennen. Die Untersuchung von MIPI- oder Ethernet-Frames auf Paketebene verifiziert, dass die Zeitstempel auch nach einem Reset des Encoders erhalten bleiben. Diese Erkenntnis beeinflusst die hardware , lange bevor das Board-Layout feststeht.
Sie können auch ungünstige Beleuchtungsverhältnisse, Nebel und partielle Verdeckungen durch Shader des Grafiksubsystems nachbilden, ohne die Teststrecken zu gefährden. Eine solche Vorteilverbessert die bei Sicherheitsbewertungen verwendeten Metriken zur Maschinenwahrnehmung. Wichtig ist auch, dass der Prüfstand Wiederholungsläufe unterstützt und somit statistische Sicherheit statt vereinzelter Beobachtungen bietet. Die Aufsichtsbehörden legen Wert auf eine quantitative Untermauerung, wenn Ihr Sicherheitsnachweis ein bestimmtes Niveau der Betriebsbereitschaft im Designbereich behauptet.
Die Aufsichtsbehörden legen Wert auf eine quantitative Untermauerung, wenn Ihr Sicherheitsnachweis ein bestimmtes Niveau der Betriebsbereitschaft im Konstruktionsbereich vorgibt.
Unterstützung bei der Homologation durch die Behörden
Die Aufsichtsbehörden verlangen jetzt den Nachweis, dass automatisierte Systeme bei elektrischen, funktionalen und Cyber-Resilienz-Tests sicher bleiben. Ein HIL-Prüfstand ermöglicht standardisierte Prüfskripte von ISO-, UN ECE- und US FMVSS-Modulen. Da derselbe Prüfstand bereits der Entwicklung diente, müssen die Prüfteams bei den Tests keine Lernkurve durchlaufen. Alle Datensätze sind mit früheren Verifikationsartefakten abgeglichen, wodurch Rückverfolgbarkeitsschleifen geschlossen werden.
Klare Beweise schaffen Vertrauen, nicht nur bei den Behörden, sondern auch bei den Versicherungsunternehmen. Die Dokumentation, die direkt vom Prüfstand aus erstellt wird, reduziert manuellen Papierkram und Übersetzungsfehler. Wenn jede Anforderungsverfolgung zu einem automatisch versionierten Simulationslauf zurückverfolgt werden kann, schützen Sie sich vor Anfechtungen bei Produkthaftungsprüfungen. Diese Risikominderung zahlt sich in der gesamten Produktion und im Service aus.
In jeder Phase überbrücken Tests die Konzeptabsicht mit der physischen Leistung in einer einzigen, kontrollierbaren Umgebung. Der gemeinsame Prüfstand fördert die Datenkontinuität, verkürzt die Rückkopplungsschleifen und hält die Budgets vorhersehbar. Die Beteiligten erhalten einen klaren Nachweis, dass jede Anforderung durch deterministische, wiederholbare Experimente erfüllt wird. Eine solche Vorhersagbarkeit ist heute eine strategische Anforderung, da autonome Technologien auf dem Weg zum Masseneinsatz sind.
Verständnis der Rolle eines Simulators für autonome Fahrzeuge bei der Systemvalidierung
Ein Simulator für autonome Fahrzeuge holt die Verkehrsszene von draußen ins Labor, und zwar mit pixelgenauer Genauigkeit und physikalischer Korrektheit. Hochpräzise Dynamiklöser replizieren Reifenkräfte, Wettereffekte und Sensorrauschen, so dass die software nahezu dieselben Daten sieht, die sie auf öffentlichen Straßen erhalten würde. Wichtig ist, dass der Simulator sofort zurückspulen kann, was eine exakte Reproduktion von Beinahe-Unfällen für die Ursachenanalyse ermöglicht. Diese Wiederholbarkeit untermauert das statistische Vertrauen, das für die Sicherheitsvalidierung erforderlich ist.
In Verbindung mit einem HIL-Bench speist der Simulator für autonome Fahrzeuge Sensorkanäle im Gleichschritt mit Echtzeittakten in physische elektronische Steuereinheiten ein. Latenzbudgets werden sichtbar, was die Zuweisung von Prozessorressourcen oder die Anpassung von Wahrnehmungspipelines vereinfacht. Ingenieur:innen passen die Auflösung der virtuellen Kamera, die Radarreichweite oder die LiDAR-Punktdichte an und beobachten sofort die Auswirkungen auf Speicher, Bandbreite und Aktuator-Timing. Diese Erkenntnisse fließen in die hardware und die Integrationsplanung ein und verhindern Überraschungen bei späteren Streckentests.
Worauf ist bei der hardware für Tests zu achten?
Die Wahl des falschen Gehäuses oder der falschen I/O kann selbst das fortschrittlichste Anlagenmodell zum Engpass werden lassen. Da Automobilprüfstände mit Motorschleifen im Submikrosekundenbereich und Sensorrahmen im Millisekundenbereich jonglieren, muss die hardware ein Gleichgewicht zwischen Präzision und Vielseitigkeit herstellen. Lebenszyklusfaktoren wie die Langlebigkeit der Firmware und die Stabilität der Kalibrierung beeinflussen ebenfalls die Gesamtkosten. Bevor Sie eine Bestellung abschließen, sollten Sie die konkreten Eigenschaften berücksichtigen, die sich auf die Produktivität im Alltag auswirken.
- Deterministische Rechenkerne: Feldprogrammierbare Gate-Arrays mit harten Fließkommaeinheiten sorgen für konstante Schrittgrößen auch bei stoßweisem CAN-Verkehr. Diese Konsistenz hält den Jitter unter den Sicherheitsmargen für Drehmoment- und Bremsschleifen.
- Sensorschnittstellen für hohe Bandbreiten: Native Unterstützung für Automotive Ethernet, MIPI CSI-2 und GMSL vermeidet externe Konverter, die Latenzzeiten und Rauschen verursachen. Durch die direkte Erfassung kann der Simulator Megapixel-Streams in Wahrnehmungsstapel einfügen, ohne dass Frames verloren gehen.
- Skalierbar analoge und digitale I/O: Modulare Kartenkäfige ermöglichen einen schnellen Wechsel zwischen Resolverdecodern, Thermoelementeingängen oder digitalen Hochspannungsschaltern. Dank dieser Flexibilität können Labore dieselbe Anlage für Projekte in den Bereichen Antriebsstrang, Karosserie und Infotainment wiederverwenden.
- Integrierte Fehlerinjektionsschalter: Eingebaute Muxes ermöglichen es Skripten, Sensorstromleitungen zu kollabieren oder Kommunikationspins kurzzuschließen. Der Verzicht auf externe Relais vereinfacht die Verdrahtung und verbessert die Wiederholbarkeit.
- Präzise Zeitsynchronisation: Die IEEE 1588 PTP Grand-Master-Fähigkeit sorgt dafür, dass die Zeitstempel von Kamera, LiDAR und ECU innerhalb von Mikrosekunden aufeinander abgestimmt sind. Eine genaue Abstimmung ist für die Validierung von Fusionsalgorithmen, die sich auf die zeitliche Anordnung verlassen, unerlässlich.
- Wärmemanagement und akustische Kontrolle: Geräuscharme Lüfter, ein leitfähiges Gehäuse und ein fein abgestimmter Luftstrom sorgen für stabile Siliziumtemperaturen in Laborumgebungen, in denen Mikrofontests durchgeführt werden. Konstante Temperaturen verringern die Drift bei analogen Front-End-Messungen und verhindern unerwartete Drosselungen.
- Wartungsfreundlichkeit und Zugang zur Kalibrierung: Herausschiebbare Module und Anschlüsse auf der Vorderseite verkürzen die Ausfallzeiten für Kalibrierungen. Regelmäßige Wartung bewahrt die Integrität der Messungen über mehrere Jahre hinweg.
Hardware beeinflussen alles, von der Simulationstreue bis zur Arbeitsmoral der Techniker. Wenn diese Qualitäten übereinstimmen, werden unerwartete Verzögerungen in der Projektplanung vermieden. Das von Ihnen gewählte Chassis sollte im täglichen Betrieb unsichtbar sein und nur dann auftauchen, wenn Sie erweiterte Funktionen benötigen. Dank dieser Transparenz können sich Ingenieur:innen auf die Modellierung und die Ergebnisse konzentrieren, nicht auf die Laborlogistik.
Wie die Simulation autonomer Fahrzeuge das Risiko in der frühen Entwicklungsphase verringert
Frühe Entwurfsphasen sind mit großer Unsicherheit behaftet, da Entscheidungen getroffen werden, bevor vollständige Prototypen existieren. Die Simulation von autonomen Fahrzeugen verringert diese Unsicherheit, indem sie die Leistungsgrenzen unter kontrollierten virtuellen Bedingungen aufzeigt. Das Ersetzen von Buchungen für physische Teststrecken durch GPU-Cluster senkt die Kosten und beseitigt wetterbedingte Planungskonflikte. Die Teams berichten, dass weniger späte Konstruktionsänderungen vorgenommen werden, sobald Erkenntnisse aus dem Vorfeld verfügbar sind.
Konzeptvalidierung unter Unsicherheit
Wenn Ingenieur:innen über die Anordnung von Sensorstapeln diskutieren, projiziert die Simulation die möglichen Konfigurationen auf digitale Straßen, die mit realistischem Verkehr gefüllt sind. Durch schnelle Iterationen werden blinde Zonen oder redundante Abdeckungen aufgedeckt, so dass Layout-Entscheidungen eher auf Daten als auf Meinungen beruhen. Diese Erkenntnisse fließen direkt in die CAD-Konstruktion ein, so dass Halterungen, Kabelbäume und Kühlbleche der endgültigen Platzierung entsprechen. Da keine Prototypenteile geschnitten werden, sind die Kosten für Überarbeitungen minimal.
Statistische Ergebnisse wie z. B. Konfidenzintervalle für die Erkennungsrate dienen der Ressourcenzuweisung. Das Management kann Personal für die LiDAR-Verarbeitung oder die Entschärfung von Radarinterferenzen bereitstellen, wenn der Nutzen quantifizierbar ist. Transparente Kennzahlen sorgen dafür, dass die Budgets vor den Führungskräften verteidigt werden können. Risikokennzahlen schrumpfen schnell, sobald Spekulationen über Konzepte durch numerische Nachweise ersetzt werden.
Prototyping von Algorithmen für die Sensorfusion
Komplexe Fusionsfilter beruhen auf einer Kovarianzabstimmung, die auf öffentlichen Straßen unpraktisch zu Verfeinern ist. Bei der Simulation von autonomen Fahrzeugen werden Parameter-Sweeps in erweiterte Kalman- oder Partikelfilter eingespeist, während die Abweichung des Zustands überwacht wird. Ausreißerfälle führen zu Parametersätzen, die Divergenz ohne Überglättung vermeiden. Die kontrollierte Einstellung beschleunigt die Konvergenz bei robusten Filtergewinnen.
Sobald sich die Verstärkung stabilisiert hat, durchlaufen dieselben simulierten Daten signalbedingte Störungen wie Regenstreifen oder verlorene Ethernet-Frames. Ingenieur:innen beobachten Algorithmus-Fallbacks in einer vorhersehbaren Abfolge, was die Isolierung der Grundursache erleichtert. Die Korrekturlogik wird Teil des Entwurfs und nicht ein später Patch. Die Stakeholder gewinnen das Vertrauen, dass die Wahrnehmung auch unter schwierigen Bedingungen stabil bleibt.
Probe für Cybersicherheitsbedrohungen
Vernetzte Fahrzeuge sind Spoofing-Versuchen, missgebildeten Paketen und nicht autorisierten Over-the-Air-Updates ausgesetzt. In virtuellen Testumgebungen können Red-Team-Spezialisten Bedrohungen einschleusen, ohne die Sicherheit der Flotte zu gefährden oder gegen Vorschriften zu verstoßen. software lernt, manipulierte Frames zu erkennen und unter Quarantäne zu stellen, während Metriken zur Dienstkontinuität aufgezeichnet werden. Durch die frühzeitige Erkennung von Cyber-Lücken werden kostspielige Rückrufe nach dem Start vermieden.
Simulationsszenarien für autonome Fahrzeuge können den aufgezeichneten Datenverkehr von Penetrationstests wiedergeben und so die Überprüfung von Patches beschleunigen. Da digitale Zwillingsuhren deterministisch bleiben, beweist der Vergleich von Vorher- und Nachher-Spuren die Wirksamkeit einer Korrektur. Während der Simulation erzeugte Audit-Artefakte fließen direkt in die Einreichung von Konformitätserklärungen wie UNECE R155 ein. Sicherheit wird zu einer Designkomponente und nicht zu einer Verpflichtung in letzter Minute.
Quantifizierung des Sicherheitsnachweises
Die Regulierungsbehörden verlangen den statistisch gesicherten Nachweis, dass die automatisierten Funktionen unterhalb signifikanter Gefahrenschwellen bleiben. Mit Simulationen lassen sich Milliarden von Szenario-Permutationen schneller durchspielen, als dies mit einer physischen Flotte möglich wäre. Monte-Carlo-Ansätze messen die Erreichung der funktionalen Sicherheitsziele zu vertretbaren Kosten. Muster in den Fehlermodi geben Aufschluss über die Zuweisung von Redundanzen und die Dimensionierung der Domain Controller.
Jedes Szenariopaar, wie z.B. das Abfliegen eines Kindes oder das Zusammenführen von Verkehr, erhält Tags für den operativen Entwurfsbereich, die später abgerufen werden können. Ingenieur:innen verpacken diese Tags mit Schweregradmetriken, die die Leistungsrichtlinien der ISO 21448 erfüllen. Die klare Rückverfolgbarkeit von der Anforderung bis zum Simulationszähler hält die Abzeichnungszeit überschaubar. Letztendlich wird das Risiko frühzeitig quantifiziert, so dass sich die Verantwortlichen auf den Starttermin verlassen können.
Simulierte Kilometer, die während der Konzept- und Algorithmusphase gesammelt werden, verringern die Anzahl der benötigten physischen Prototypen. Eine eindeutige Quantifizierung der Erkennungs-, Fusions-, Cyber- und Sicherheitsmargen bedeutet, dass Design-Freezes auf der Grundlage von Daten und nicht von Intuition erfolgen. Die Simulation von autonomen Fahrzeugen verlagert daher das Risiko aus den späten Fertigungsphasen in erschwingliche Rechencluster. Projekte schreiten mit größerer Vorhersehbarkeit und weniger kostspieligen Überraschungen voran.
Vergleich von software für autonome Fahrzeuge im Hinblick auf Echtzeitleistung
Der Hauptunterschied zwischen führenden Simulationsprogrammen für autonome Fahrzeuge software Plattformen liegt in ihrer Fähigkeit, strenge Echtzeitfristen einzuhalten und gleichzeitig die fortschrittliche Sensorphysik zu fördern. Plattformen, die für High-Fidelity-Animationen optimiert sind, verzichten manchmal auf Determinismus, was zu verpassten Fristen auf den hardware führt. Andere Tools opfern Rendering-Nuancen für eine garantierte Schrittgröße und schränken die Tiefe der Wahrnehmungsvalidierung ein. Die Wahl des richtigen Gleichgewichts hängt vom Latenzbudget Ihres Programms, den Sensormodalitäten und den Rechenressourcen ab.
| software | Physik-Treue bei hoher Bildrate | Latenzgarantie in Echtzeit (1 ms-Schritt) | Native HIL-Integration | Ansatz der Lizenzvergabe |
| CARLA | Detaillierte städtische LiDAR- und Kamerarenderings; Open-Source-Asset-Bibliothek | Variabel; typischerweise 5-15 ms bei reiner CPU, GPU-Beschleunigung verbessert, aber nicht deterministisch | Erfordert externe Middleware für HIL-Kopplung | Freizügige Open-Source |
| NVIDIA DRIVE Sim | PhysX-basierte Dynamik; Sensor-Pipelines mit Pfadverfolgung | 1 ms erreichbar auf dedizierter hardware; deterministisch unter Scheduler-Steuerung | Enge Integration mit DRIVE AGX-Steuerungen | Proprietär, hardware |
| IPG CarMaker | Physikbasiertes Reifen- und Antriebsstrangmodell; mäßiger Sensor-Realismus | 1-2 ms deterministisch auf Standard-x86 mit RTOS | Direkte Ethernet- und CAN-Schnittstellen für HIL | Pro Sitzplatz geschäftliche |
| dSPACE ASM | Schwerpunkt auf steuerungsorientierter Dynamik; Sensor-Erweiterungen optional | 1 ms harte Garantie durch Echtzeitbetriebssystem und FPGAs | Native Kopplung mit dSPACE-HIL-Racks | Unbefristete Lizenz, modulbasiert |
Open-Source-Optionen wie CARLA zeichnen sich durch Szenariovielfalt und von der Community generierte Assets aus, aber es ist zusätzlicher Code erforderlich, um sie mit HIL-Bänken zu verbinden. geschäftliche Suiten wie IPG CarMaker bieten schlüsselfertige Echtzeit-Scheduler, die den Einsatz beschleunigen, wenn eine deterministische Leistung erforderlich ist. HardwarePlattformen von Siliziumanbietern erzielen beispiellose Bildwiederholraten, allerdings müssen die Teams für proprietäre Boards ein Budget einplanen. Die Bewertung der Gesamtbetriebskosten, des Integrationsaufwands und der Supportreife hilft Ihnen bei der Auswahl eines Tools, das Ihre Benchmark ergänzt, anstatt sie zu bekämpfen.
Gemeinsame technische Herausforderungen mit Simulationswerkzeugen für autonome Fahrzeuge
Selbst leistungsfähige Simulationsstacks stoßen auf praktische Probleme, sobald die hardware und Testanforderungen steigen. Diese Probleme tauchen oft erst nach wochenlangen nächtlichen Testläufen auf und bremsen den Fortschritt, wenn der Druck bereits hoch ist. Das frühzeitige Erkennen von Fallstricken hilft den Teams, Maßnahmen zur Abhilfe zu ergreifen, bevor der Zeitplan ins Wanken gerät. Ingenieur:innen , die die wahrscheinlichen Hürden kennen, können im Voraus Notfallpläne entwerfen.
- Asset-Treue versus GPU-Budget: Mit zunehmender Realitätsnähe der Sensoren steigt die Anzahl der Polygone und die Komplexität der Shader, wodurch der GPU-Speicher schnell an seine Grenzen stößt. Ingenieur:innen müssen ein Gleichgewicht zwischen Realitätsnähe und konsistenter Bildwiedergabe finden, um Terminüberschreitungen zu vermeiden.
- Die Latenzzeit des geschlossenen Regelkreises driftet: Stürmischer Netzwerkverkehr, Treiberaktualisierungen und Host-OS-Unterbrechungen können die Zykluszeiten über die Sicherheitsgrenzen hinaus verlängern. Überwachungstools, die Abweichungen im Mikrosekundenbereich protokollieren, sind für die Früherkennung unerlässlich.
- Versionsabweichungen in verschiedenen Toolchains: Geringfügige Aktualisierungen von Physik-Engines oder Grafikbibliotheken können die Sensorausgaben ändern, wodurch die Vergleichsbasis unterbrochen wird. Strenges semantisches Versions-Pinning hält historische Daten vergleichbar.
- Massive Datenspeicherung: Nächtliche Wahrnehmungskampagnen erzeugen Terabytes an kommentierten Bildern, die den netzgebundenen Speicher überfordern. Inkrementelle Komprimierung und abgestufte Archivierungsrichtlinien halten die Speicherkosten überschaubar.
- Schwierigkeiten bei der Reproduktion zufälliger Seeds: Simulatoren verwenden oft pseudozufällige Verkehrsakteure, so dass es schwierig ist, exakte Absturzsequenzen zu reproduzieren. Die Speicherung von Seed-Werten und Engine-Versionen in den Lauf-Metadaten schützt die Reproduzierbarkeit.
- Modellierung echter Sensorverfälschungen: Die Abbildung von Reflexionen von Laborkameras oder LiDAR-Bloom in synthetischen Pipelines erfordert eine sorgfältige Kalibrierung. Ohne genaue Artefakte unterschätzt die Validierung die Fehlerraten im Feld.
- Komplexe Lizenzbeschränkungen: Node-locked oder hardwareSchlüssel verlangsamen die Skalierung des Clusters bei Spitzenauslastung. Durch die Planung von Ersatzlizenzen im Voraus wird ungenutzte hardware vermieden.
Die meisten dieser Hürden sind eher auf Kompromisse bei der Skalierung als auf grundlegende Mängel in der Simulationstechnologie zurückzuführen. Proaktive Protokollierung, deterministische Zeitplanung und solide Datenverwaltungsrichtlinien verhindern viele Überraschungen in einem späten Stadium. Teams, die Simulationen als Produktionsmittel und nicht als Ad-hoc-Tools behandeln, berichten durchweg von reibungsloseren Validierungsphasen. Die Bewältigung dieser Herausforderungen zahlt sich aus, wenn bei Zertifizierungsaudits die Datenreihenfolge und die zeitliche Konsistenz geprüft werden.
Wie OPAL-RT Ingenieur:innen bei der fortgeschrittenen Automobilsimulation unterstützt
OPAL-RT verbindet praxiserprobte hardware mit offener software so dass Sie Prüfstände ohne Herstellerbindung aufbauen und skalieren können. Unsere FPGA-beschleunigten Kerne halten die Präzision von einer Mikrosekunde selbst bei Gigabit-Sensorlasten aufrecht und schützen die Stabilität der Regelschleife. RT-LAB vereinheitlicht MATLAB/Simulink-, FMI- und Python-Modelle und ermöglicht Ihnen die Iteration der Anlagentreue unter Beibehaltung der imperialen oder metrischen Skalierung. Integrierte Cloud-Konnektoren verlagern Regressionsläufe über Nacht auf Hochleistungs-Rechenknoten und verkürzen so die Warteschlangen im Labor. Globale Support-Teams mit umfassender Erfahrung in der Automobilbranche stehen bereit, um Probleme mit dem Timing oder der I/O zu lösen, wenn die Zeitpläne eng werden.
Die HIL-Plattformen der OPAL-RT OP6000- und OP7000-Serien umfassen modulare Sensor-Mezzanine, präzise Zeitsynchronisation und automatische Fehlerschalter, die mit den oben genannten hardware übereinstimmen. toolboxes sind über Python-APIs direkt mit dem Prüfstand verbunden, so dass Sie prädiktive Abtastung oder Anomalieerkennung ohne benutzerdefinierte Middleware anwenden können. Transparente Preismodelle unterstützen Manager bei der Prognose von Investitionsausgaben, während software abwärtskompatibel bleiben, um mehrjährige Programme zu unterstützen. Hunderte von Automobil-, Luft- und Raumfahrt- sowie akademischen Labors verlassen sich auf diese Lösungen, um schneller sicheren Code bereitzustellen, was unser Engagement für Leistung und Offenheit bestätigt. Verantwortliche in der Entwicklung entscheiden sich für OPAL-RT, weil die bewährte Echtzeitgenauigkeit Vertrauen schafft, Audits absichert und Projekte auf Kurs hält.
Allgemeine Fragen
Welchen Zweck haben Tests in der Automobiltechnik?
Bei Hardware(HIL) Tests werden reale elektronische Steuergeräte mit simulierten Fahrzeugsystemen verbunden, um die Leistung zu validieren, ohne dass vollständige Prototypen benötigt werden. Dies ermöglicht eine frühzeitige Erkennung von Designfehlern, verbessert die Regressionsanalyse und reduziert die Abhängigkeiten von Teststrecken. Ingenieur:innen können Vorteil und Fehlerszenarien unter kontrollierten Bedingungen sicher bewerten. OPAL-RT Plattformen unterstützen dies mit präzisen, Skalierbar Prüfständen, die die Entwicklung im Zeitplan halten und die Daten auditfähig machen.
Wie können Simulationen autonomer Fahrzeuge die frühe Entwicklungsphase verbessern?
Simulationen in frühen Entwurfsphasen helfen den Teams bei der Vorhersage, wie Steuerungsalgorithmen auf Sensordaten in verschiedenen Fahrszenarien reagieren. Dies verringert die Abhängigkeit von physischen Prototypen und ermöglicht es Ingenieur:innen , Tausende von Vorteil zu testen, die auf einer Rennstrecke nicht realisierbar sind. Es verbessert auch die Entscheidungen über das Komponentenlayout und die software , bevor die Bauphase beginnt. OPAL-RT macht dies mit digitalen Zwillingen in Echtzeit möglich, die parallel zu Ihren Design-Iterationen laufen.
Wie wähle ich die beste hardware für die Fahrzeugsimulation aus?
Sie benötigen hardware mit niedriger Latenz, modularer I/O, nativer Sensorunterstützung und Zeitsynchronisation, die für Fahrzeugregelkreise ausgelegt ist. Deterministisches Verhalten unter Last, Flexibel und hoher Datendurchsatz sind Schlüsselanforderungen für die Validierung von Steuergeräten und Sensor-Fusionslogik. Suchen Sie nach Plattformen, die sich nahtlos in Ihre bestehenden Toolchains integrieren lassen. Die hardware wurde speziell für diese Anforderungen entwickelt und hilft Ingenieur:innen dabei, sichere, wiederholbare Experimente mit vollem Vertrauen durchzuführen.
Warum ist Echtzeitleistung bei software für die Simulation autonomer Fahrzeuge wichtig?
Die Echtzeitsimulation stellt sicher, dass Ihr Steuercode unter strengen Zeitvorgaben getestet wird, die das Geschehen im tatsächlichen Fahrzeug widerspiegeln. Wenn der Simulator Fristen versäumt oder Jitter einführt, können sicherheitsrelevante Fehler während der Entwicklung unbemerkt bleiben. Die Aufrechterhaltung der Timing-Genauigkeit bei hochrealistischen Szenen ist eine technische Herausforderung, die nicht alle Werkzeuge gleichermaßen lösen. OPAL-RT überbrückt diese Lücke mit Echtzeit-Ausführungsmodulen und integrierten Sensor-Co-Simulationspipelines.
Wie kann KI meine Tests unterstützen?
KI-Tools unterstützen die automatische Generierung von Szenarien, die Erkennung von Anomalien und die Priorisierung der Testabdeckung und beschleunigen so den Simulationsdurchsatz und die Fehlererkennung. Außerdem können sie Sensordaten automatisch kennzeichnen, Muster in Protokollen erkennen und den Wartungsbedarf von Prüfständen vorhersagen. Dies reduziert den manuellen Arbeitsaufwand und steigert die Effizienz des Laborbetriebs. OPAL-RT-Plattformen sind KI-fähig und verfügen über offene APIs, um diese Funktionen direkt in Ihrem bestehenden HIL-Setup zu unterstützen.
Echtzeitlösungen für alle Branchen
Entdecken Sie, wie OPAL-RT die weltweit fortschrittlichsten Branchen verändert.

Energiesysteme
25.07.2026
Warum Distanzschutzrelais unter realen Fehlerbedingungen falsch auslösen
In diesem Beitrag wird erläutert, warum Fernschutzrelais bei Fehlerwiderständen, Einspeisungen aus dem Netz, transienten Zuständen bei kapazitiven Spannungswandlern und starken Lastwechseln eine falsche Reichweite aufweisen und wie simulationsbasierte Tests die Zonenreichweite vor der Inbetriebnahme Tests .

Energiesysteme
23.07.2026
Automatisierung von Tests zur Einhaltung der Netzvorschriften Tests Wechselrichter-basierte Anlagen
Tests der Netzkodekonformität Tests Wechselrichteranlagen stützt sich auf Studien zu schwachen Netzen, festgelegte Störungsdefinitionen, wiederholbare, vorab festgelegte Abläufe und strukturierte Nachweise für das Bestehen bzw. Nichtbestehen der Prüfung.

Leistungselektronik
22.07.2026
Tests die Tests Steuerung auf ihre Sicherheit, bevor hardware angeschlossen wird
Auf dieser Seite wird erläutert, wie Fehlerinjektion, Regelkreismodelle und Wiederherstellungsprüfungen unterstützen , die Steuerung von Umrichtern vor hardware unterstützen .