Maîtriser les outils de simulation automobile pour le développement de véhicules autonomes
Automobile
08 / 05 / 2025

Votre prochain prototype autonome doit quitter le garage en toute confiance. Cette tranquillité d'esprit est le fruit d'une simulation exhaustive bien avant que les roues ne touchent l'asphalte. Les bancs Hardware-in-the-Loop (HIL) et les pistes virtuelles riches en physique permettent de détecter plus tôt les anomalies, de réduire le temps d'intégration et de limiter les rappels coûteux. Cependant, pour obtenir des résultats fiables et reproductibles, il faut des outils qui s'adaptent à la montée en flèche des charges de perception et aux normes de sécurité strictes.
Les récentes percées dans le domaine du traitement graphique, des réseaux de portes programmables et de l'apprentissage automatique ont modifié les délais de développement des véhicules. Les équipes peuvent désormais évaluer les capteurs, la logique décisionnelle et les actionneurs dans un cadre numérique unifié fonctionnant plus rapidement qu'en temps réel. Ces gains ne sont importants que lorsque la plateforme, le matériel et les flux de travail s'alignent sur les contraintes quotidiennes de l'ingénierie. Ce guide propose des conseils pratiques sur la sélection, l'intégration et la mise à l'échelle des outils de simulation automobile afin de fournir plus rapidement un code plus sûr.
Pourquoi les essais HIL dans les systèmes automobiles permettent-ils de gagner du temps et d'améliorer la validation ?
Dans les projets automobiles, les essais Hardware-in-the-Loop remplacent les coûteux prototypes routiers par un banc contrôlé qui relie les unités de contrôle électronique à un modèle d'usine en temps réel. Au lieu d'attendre des semaines la construction d'un harnais prototype, vous téléchargez le micrologiciel de commande sur le banc et parcourez des kilomètres virtuels en quelques minutes. Comme le modèle de l'usine fonctionne de manière déterministe à côté du contrôleur, les pannes sont reproduites à la demande et enregistrées sans données de traçage ambiguës. Les défaillances précoces détectées grâce aux tests HIL dans les flux de travail automobiles réduisent généralement les cycles de vérification de 30 %, ce qui vous donne plus de marge de manœuvre pour l'étalonnage et la certification. Des cycles plus courts signifient moins d'ordres de modification, des parcs de prototypes plus petits et une meilleure couverture statistique avant la réservation d'une seule piste d'essai.
Les gains de temps ne justifient pas à eux seuls l'investissement dans le HIL si la profondeur de la validation ne s'améliore pas également. Un banc permet l'injection de fautes bien au-delà de ce que les réglementations autorisent sur les routes publiques, permettant à votre équipe d'évaluer les redémarrages hors tension, les chutes de tension ou les trames de capteurs usurpées en toute sécurité. En reliant le même modèle d'usine à votre logiciel en boucle, vous vous assurez que les entrées observées dans les premiers sprints d'algorithme correspondent à celles de l'approbation finale, ce qui renforce la traçabilité. Le fil continu entre le modèle dans la boucle et le HIL raccourcit l'analyse des causes profondes, ce qui permet de réduire les coûts et les risques pour les programmes électriques et autonomes complexes.
Avantages de la combinaison des essais HIL dans l'automobile avec des approches basées sur l'IA
L'intelligence artificielle apporte la reconnaissance des formes aux bancs d'essai qui excellent déjà dans le domaine des E/S déterministes. L'association des deux vous permet de balayer des espaces de paramètres d'une taille stupéfiante sans script manuel. Il en résulte un plus grand nombre de défauts observés par heure et une plus grande couverture de situations que les ingénieurs n'auraient jamais envisagées lors d'examens traditionnels. Avant d'examiner les gains spécifiques, il convient de voir comment l'inférence statistique, l'apprentissage par renforcement et l'échantillonnage adaptatif complètent les topologies d'essai automobile HIL.
- Découverte plus rapide des pannes : Les classificateurs à apprentissage automatique observent les traces de signaux en temps réel et signalent les anomalies en quelques millisecondes, ce qui évite aux ingénieurs de devoir parcourir de vastes fichiers journaux. Le classement des classificateurs permet de hiérarchiser les efforts de correction afin que l'équipe s'attaque d'abord aux problèmes à fort impact.
- Génération de scénarios à grande échelle : Les modèles génératifs proposent des milliers de scènes de trafic rares qui respectent la physique, et les introduisent directement dans le banc HIL. Cette ampleur expose les pipelines de capteurs à des dangers peu fréquents tels que des panneaux de signalisation partiellement occultés ou des piétons erratiques.
- Séquencement adaptatif des tests : Les agents de renforcement apprennent quelles combinaisons d'entrées sont les plus susceptibles de faire apparaître des régressions de contrôleurs, ce qui permet au banc d'allouer le temps d'exécution là où c'est le plus important. Au cours des nuits et des week-ends, l'agent affine sa politique, de sorte que les examens du lundi commencent toujours avec des données fraîches de grande valeur.
- Maintenance prédictive du banc : Les réseaux neuronaux étudient la télémétrie de la tension et de la température des boîtiers de charge, avertissant le personnel du laboratoire avant que les relais ou les étages de puissance ne sortent des limites de tolérance. Cette anticipation permet de préserver la précision des mesures et de réduire les temps d'arrêt imprévus.
- Étiquetage automatique des sorties de capteurs : Les transformateurs de vision annotent les segments sémantiques à l'intérieur des images de caméras synthétiques transmises par le cluster graphique, ce qui réduit considérablement les heures d'étiquetage par l'homme. Des étiquettes précises accélèrent la validation de la pile de perception lorsqu'elles sont fusionnées avec l'émulation LiDAR et radar.
- Mesures de sécurité probabilistes : Les estimateurs bayésiens convertissent les compteurs de simulation bruts en marqueurs de risque structurés qui s'alignent sur les audits ISO 26262 et UL 4600. Les auditeurs peuvent ensuite retracer la manière dont chaque mesure est issue d'une campagne répétable pilotée par l'IA plutôt que de scénarios choisis à la main.
L'association d'algorithmes d'apprentissage gourmands en données et de bancs HIL déterministes en temps permet d'accroître la vitesse et la profondeur de la validation. Au lieu de choisir entre l'étendue des statistiques et la fidélité électrique, vous obtenez les deux dans un flux de travail unifié. Cette synergie permet aux ingénieurs experts de se concentrer sur les décisions d'architecture tout en laissant les agents automatisés faire le gros du travail pendant la nuit. Des catégories de risques mieux couvertes signifient moins de surprises lors des essais sur route, des discussions de certification plus fluides et des voies de commercialisation plus courtes.
Des cycles plus courts signifient moins d'ordres de modification, des parcs de prototypes plus petits et une meilleure couverture statistique avant la réservation d'une seule piste d'essai.
Principaux cas d'utilisation pour les essais automobiles HIL à tous les stades de la simulation
Les bancs HIL brillent tout au long du cycle de développement, et pas seulement lors de la validation finale. Chaque étape bénéficie du fait que le même modèle d'usine alimente la prochaine série de questions de conception. La continuité permet d'éviter de retravailler les données et donne aux responsables une vision claire des exigences et des mesures. Les équipes ancrent souvent les budgets une fois qu'elles voient comment un seul banc répond à des questions qui relèvent normalement de plusieurs laboratoires.
Modélisation des premiers concepts
Au stade de l'esquisse, les ingénieurs veulent avoir la preuve que les théories de contrôle de haut niveau se comporteront en fonction des contraintes physiques. Une installation HIL rapide chargée de blocs d'usine grossiers génère des profils de retard et de saturation que vous ne pouvez pas voir dans des boucles purement logicielles. Ces profils renseignent sur les marges initiales requises avant que les coûts du matériel n'augmentent. Étant donné que les essais HIL dans le contexte automobile incluent déjà les voies de communication matérielles, les premières décisions conceptuelles tiennent compte des temps de latence des bus qui, autrement, n'apparaîtraient que des mois plus tard.
L'utilisation du banc permet également de coder en dur des formats de données qui perdurent tout au long du programme. Lorsque votre équipe affine ultérieurement la fidélité de l'usine, le code de l'interface reste intact, ce qui permet de respecter le calendrier. Cette approche minimise les remaniements douloureux lorsque les fournisseurs livrent des modèles de composants mis à jour. Les parties prenantes apprécient le fait que le capital initial dépensé sur le banc arrête la dérive de la conception plutôt que d'ajouter des frais généraux.
Maturation des algorithmes
Une fois les lois de commande compilées, l'accent est mis sur la stabilité et la robustesse dans un large spectre d'états du véhicule. Les bancs HIL injectent des perturbations telles que les rapports de glissement des pneus, l'ondulation électrique ou les variations de température de la batterie, tout en conservant un calendrier déterministe. Le calendrier déterministe est important car la gigue cache des problèmes de valeurs propres qui n'apparaissent qu'à des décalages d'échantillons précis. Les tests automobiles HIL permettent d'ajuster le temps d'échantillonnage, le pas du solveur et la quantification en toute sécurité, à l'abri de l'activité aléatoire du réseau.
Les ingénieurs itèrent à travers des cartes de planification des gains bien plus rapidement que ne le permettent les sessions de travail. Les outils de contrôle des versions enregistrent chaque exécution, de sorte que le triage des régressions reste simple. La génération automatique de rapports associe les marges numériques aux identifiants des exigences, ce qui simplifie l'approbation des parties prenantes. Ces artefacts serviront plus tard à étayer les preuves du dossier de sécurité lors des audits de sécurité fonctionnelle.
Intégration du groupe motopropulseur
Les groupes motopropulseurs électriques ajoutent des boucles de courant à large bande passante qui peuvent déstabiliser les anciens réseaux de contrôle de la carrosserie. Un banc couple les microsecondes du contrôleur aux millièmes de degrés électriques de la machine, préservant des relations de phase inaccessibles dans les études hors ligne. Cette fidélité permet de confirmer la coordination de l'isolation, les stratégies de contournement des défaillances et les budgets thermiques avant que le temps passé sur le banc ne soit réservé. Il en résulte une consolidation des étapes d'intégration dans les domaines de la propulsion, de la carrosserie et de l'infodivertissement.
Les données des bancs d'essai facilitent également les négociations avec les fournisseurs. Des preuves tangibles de simulation appuient les demandes de mise à jour du micrologiciel de l'onduleur ou d'amélioration des faisceaux de câbles. Les fournisseurs réagissent plus rapidement lorsqu'ils reçoivent des registres structurés plutôt que des rapports anecdotiques. Les gestionnaires de programme constatent une diminution des cycles de mise à jour en direct une fois que les prototypes physiques ont atteint le terrain d'essai.
Tests de stress pour la fusion de capteurs
Les systèmes avancés d'assistance au conducteur et d'autonomie reposent sur la fusion multimodale des flux LiDAR, radar, ultrasonique et caméra. L'exécution de ces canaux dans une boucle matérielle fermée avec le contrôleur révèle rapidement les goulets d'étranglement de la mise en mémoire tampon et la pression de la mémoire. L'examen des trames MIPI ou Ethernet au niveau des paquets permet de vérifier que les horodatages survivent aux réinitialisations de l'encodeur. Ces informations influencent la sélection du matériel bien avant que les cartes ne soient figées.
Vous pouvez également reproduire des conditions d'éclairage défavorables, du brouillard et des occlusions partielles par le biais de shaders du sous-système graphique sans risquer de mettre en péril les actifs de la piste d'essai. Une telle couverture des cas extrêmes renforce les mesures de perception de la machine utilisées dans les évaluations de sécurité. Il est important de noter que le banc permet de répéter les essais, ce qui permet d'obtenir une confiance statistique plutôt que de se contenter d'observations dispersées. Les régulateurs apprécient le soutien quantitatif lorsque votre dossier de sécurité revendique des niveaux spécifiques de préparation du domaine de la conception opérationnelle.
Les régulateurs apprécient le soutien quantitatif lorsque votre dossier de sécurité revendique des niveaux spécifiques de préparation du domaine de la conception opérationnelle.
Soutien à l'homologation réglementaire
Les régulateurs exigent désormais des preuves que les systèmes automatisés restent sûrs grâce à des tests électriques, fonctionnels et de cyber-résilience. Un banc HIL facilite les scripts de test standardisés des modules ISO, UN ECE et US FMVSS. Le même banc ayant déjà servi au développement, les équipes d'audit n'ont pas de courbe d'apprentissage à parcourir lors des essais en présence de témoins. Tous les ensembles de données s'alignent sur les artefacts de vérification antérieurs, ce qui permet de fermer les boucles de traçabilité.
Des preuves claires renforcent la confiance non seulement des autorités, mais aussi des assureurs. La documentation produite directement à partir du banc d'essai réduit la paperasserie manuelle et les erreurs de traduction. Lorsque chaque trace d'exigence est liée à un cycle de simulation à version automatique, vous vous protégez contre les contestations lors des examens de la responsabilité du fait des produits. Cette réduction des risques porte ses fruits tout au long de la production et du service.
À chaque étape, les essais automobiles HIL font le lien entre l'intention du concept et la performance physique dans un cadre unique et contrôlable. Le banc partagé favorise la continuité des données, raccourcit les boucles de rétroaction et rend les budgets prévisibles. Les parties prenantes obtiennent des preuves claires que chaque exigence est satisfaite grâce à des expériences déterministes et reproductibles. Cette prévisibilité est désormais une exigence stratégique à mesure que les technologies autonomes évoluent vers un déploiement de masse.
Comprendre le rôle d'un simulateur de voiture autonome dans la validation des systèmes
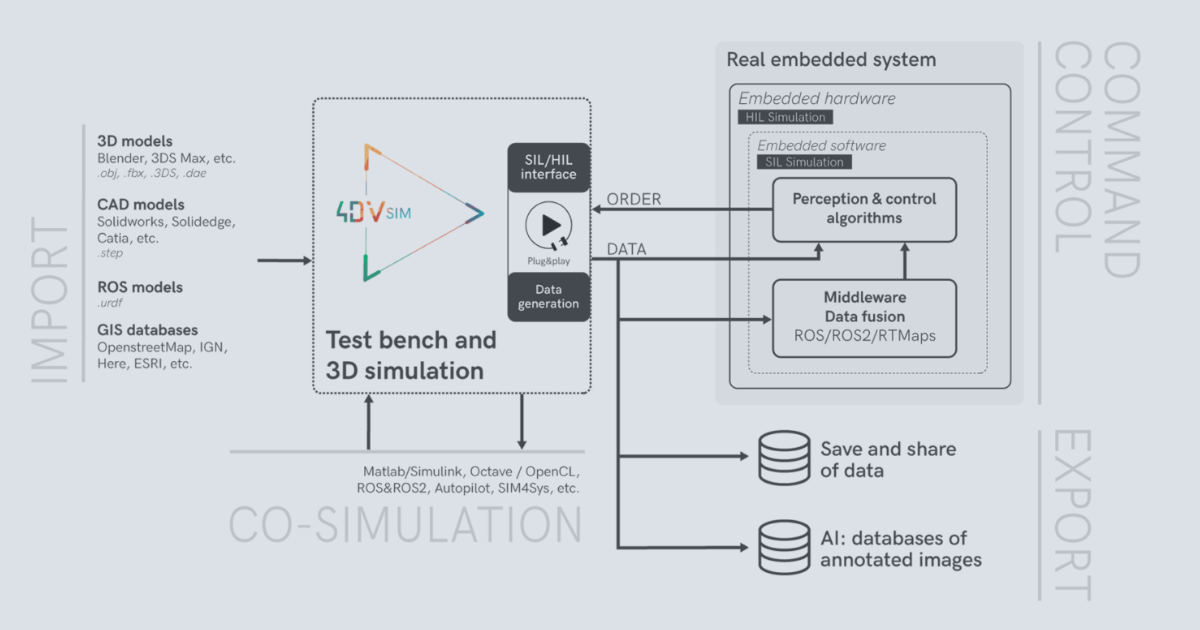
Un simulateur de voiture autonome introduit la scène de la circulation extérieure dans le laboratoire avec une fidélité au niveau du pixel et une exactitude physique. Des solveurs dynamiques de haute précision reproduisent les forces exercées par les pneus, les effets météorologiques et le bruit des capteurs, de sorte que le logiciel de contrôle voit pratiquement les mêmes données que celles qu'il recevrait sur les routes publiques. Il est important de noter que le simulateur peut revenir en arrière instantanément, ce qui permet de reproduire exactement les accidents évités de justesse pour l'analyse des causes profondes. Cette répétabilité est à la base de la confiance statistique nécessaire à la validation de la sécurité.
Couplé à un banc HIL, le simulateur de voiture autonome alimente les canaux de capteurs vers les unités de contrôle électronique physiques en synchronisation avec les horloges en temps réel. Les budgets de latence deviennent visibles, ce qui facilite l'allocation des ressources processeur ou l'ajustement des pipelines de perception. Les ingénieurs ajustent la résolution de la caméra virtuelle, la portée du radar ou la densité des points LiDAR et observent immédiatement l'impact sur la mémoire, la bande passante et la synchronisation des actionneurs. Ces informations en boucle fermée éclairent la sélection du matériel et la planification de l'intégration, évitant ainsi les surprises lors des tests ultérieurs sur piste.
Ce qu'il faut rechercher dans le matériel pour les applications d'essai automobile HIL
Le choix d'un mauvais châssis ou d'une mauvaise carte d'E/S peut entraîner un goulot d'étranglement, même dans le modèle d'usine le plus avancé. Comme les bancs automobiles jonglent avec des boucles de moteur sub-microsecondes et des trames de capteurs millisecondes, le matériel doit concilier précision et polyvalence. Les facteurs liés au cycle de vie, tels que la longévité du micrologiciel et la stabilité de l'étalonnage, influent également sur le coût total. Avant de finaliser les commandes, il faut prendre en compte les caractéristiques tangibles qui affectent la productivité quotidienne.
- Noyaux de calcul déterministes : Les réseaux de portes programmables avec des unités de virgule flottante dure maintiennent des tailles de pas constantes, même en cas de trafic CAN irrégulier. Cette constance permet de maintenir la gigue en dessous des marges de sécurité pour les boucles de couple et de freinage.
- Interfaces de capteurs à large bande passante : La prise en charge native de l'Ethernet automobile, du MIPI CSI-2 et du GMSL permet d'éviter les convertisseurs externes qui ajoutent de la latence et du bruit. La capture directe permet au simulateur de pousser des flux de mégapixels dans les piles de perception sans perte de trames.
- E/S analogiques et numériques évolutives : Les boîtiers de cartes modulaires permettent des échanges rapides entre les décodeurs de résolveur, les entrées de thermocouple ou les commutateurs numériques haute tension. Cette flexibilité permet aux laboratoires de réutiliser le même appareil dans le cadre de projets relatifs au groupe motopropulseur, à la carrosserie et à l'infodivertissement.
- Commutateurs d'injection de fautes intégrés : Les muxes intégrés permettent aux scripts de couper les lignes d'alimentation des capteurs ou de court-circuiter les broches de communication à la volée. L'élimination des relais externes simplifie le câblage et améliore la répétabilité.
- Synchronisation temporelle précise : La capacité grand maître IEEE 1588 PTP permet d'aligner les horodatages de la caméra, du LiDAR et de l'ECU à quelques microsecondes près. Un alignement précis est essentiel pour valider les algorithmes de fusion qui s'appuient sur un ordre temporel.
- Gestion thermique et contrôle acoustique : Des ventilateurs silencieux, un châssis conducteur et un flux d'air finement réglé permettent de maintenir des températures stables du silicium dans les laboratoires où se déroulent les tests microphoniques. Des températures stables réduisent la dérive des mesures analogiques du front-end et empêchent un étranglement inattendu.
- Facilité d'entretien et accès à l'étalonnage : Les modules coulissants et les connecteurs en façade réduisent les temps d'arrêt pour les étalonnages. Un entretien régulier préserve l'intégrité des mesures dans le cadre de programmes pluriannuels.
Les décisions relatives au matériel influencent tout, de la fidélité de la simulation au moral des techniciens. Lorsque ces qualités sont alignées, les calendriers des projets évitent les retards inattendus. Le châssis que vous avez choisi doit être invisible au quotidien et n'apparaître que lorsque vous avez besoin de fonctions avancées. Cette transparence permet aux ingénieurs de se concentrer sur la modélisation et les résultats plutôt que sur la logistique du laboratoire.
Comment la simulation de véhicules autonomes réduit les risques lors des premières phases de développement
Les premières phases de conception souffrent d'une grande incertitude car les décisions sont prises avant que des prototypes complets n'existent. La simulation de véhicules autonomes réduit cette incertitude en révélant les limites de performance sur des kilomètres virtuels contrôlés. Le remplacement des réservations de pistes d'essai physiques par des clusters de GPU permet de réduire les coûts et d'éliminer les conflits de calendrier liés aux conditions météorologiques. Les équipes signalent moins d'inversions de conception à un stade avancé une fois qu'elles disposent d'informations de première main.
Validation de concepts dans l'incertitude
Lorsque les ingénieurs débattent de la disposition des piles de capteurs, la simulation projette les configurations candidates sur des routes numériques dotées d'un trafic réaliste. Des itérations rapides révèlent des zones aveugles ou une couverture redondante, ce qui oriente les décisions d'agencement en s'appuyant sur des données plutôt que sur des opinions. Ces résultats sont directement pris en compte dans la conception assistée par ordinateur (CAO) afin que les supports, les faisceaux et les plateaux de refroidissement soient adaptés à l'emplacement final. Comme aucune pièce du prototype n'est découpée, les révisions sont peu coûteuses.
Les résultats statistiques, tels que les intervalles de confiance du taux de détection, permettent d'orienter l'affectation des ressources. La direction peut affecter des effectifs au traitement LiDAR ou à l'atténuation des interférences radar lorsque les bénéfices sont quantifiables. Des mesures transparentes permettent de défendre les budgets devant les dirigeants. Les mesures de risque diminuent rapidement une fois que les spéculations conceptuelles sont remplacées par des preuves numériques.
Prototype d'algorithme de fusion de capteurs
Les filtres de fusion complexes reposent sur un réglage de la covariance qu'il n'est pas possible d'affiner sur la voie publique. La simulation de véhicules autonomes alimente des balayages de paramètres dans des filtres de Kalman étendus ou des filtres particulaires tout en surveillant la divergence des états. Les cas aberrants font apparaître des ensembles de paramètres qui évitent la divergence sans lissage excessif. Le réglage contrôlé accélère la convergence sur des gains de filtre robustes.
Une fois les gains stabilisés, les mêmes données simulées sont soumises à des altérations du signal, telles que des traînées de pluie ou des trames Ethernet interrompues. Les ingénieurs observent les retombées de l'algorithme dans une séquence prévisible qui facilite l'isolement de la cause première. La logique corrective fait partie intégrante de la conception plutôt que d'être un correctif tardif. Les parties prenantes sont convaincues que la perception reste résiliente dans des conditions difficiles.
Répétition des menaces en matière de cybersécurité
Les véhicules connectés sont confrontés à des tentatives d'usurpation d'identité, à des paquets malformés et à des mises à jour non autorisées. Des bancs d'essai virtuels permettent aux spécialistes de l'équipe rouge d'injecter des menaces sans mettre en péril la sécurité du parc automobile ni enfreindre les réglementations. Les logiciels défensifs apprennent à détecter et à mettre en quarantaine les trames falsifiées, tandis que les mesures de continuité de service sont enregistrées. Une prise de conscience précoce des lacunes cybernétiques permet d'éviter des rappels coûteux après le lancement.
Les scénarios de simulation de véhicules autonomes peuvent rejouer le trafic capturé lors des tests de pénétration, ce qui accélère la vérification des correctifs. Comme les horloges jumelles numériques restent déterministes, la comparaison des traces avant et après prouve l'efficacité d'un correctif. Les artefacts d'audit générés au cours de la simulation alimentent directement les demandes de conformité telles que la norme UNECE R155. La sécurité devient un élément de conception et non une obligation de dernière minute.
Quantification de la sécurité
Les régulateurs exigent des preuves statistiquement valables que les fonctions de conduite automatisée restent en deçà des seuils de danger significatifs. La simulation balaie des milliards de permutations de scénarios plus rapidement qu'une flotte physique ne pourrait le faire. Les approches de Monte-Carlo mesurent la réalisation des objectifs de sécurité fonctionnelle à un coût raisonnable. Les schémas des modes de défaillance informent sur l'attribution des redondances et le dimensionnement des contrôleurs de domaine.
Chaque paire de scénarios, tels que le départ d'un enfant ou la fusion du trafic, reçoit des étiquettes du domaine de conception opérationnelle en vue d'une récupération ultérieure. Les ingénieurs associent ces étiquettes à des mesures de gravité, conformément aux directives de performance de la norme ISO 21448. Une traçabilité claire entre les exigences et le compteur de simulation permet de gérer les délais d'approbation. En fin de compte, le risque est quantifié très tôt, ce qui permet aux dirigeants de s'engager en toute confiance sur les dates de lancement.
Le kilométrage simulé recueilli au cours des étapes du concept et de l'algorithme permet de réduire le nombre de prototypes physiques nécessaires. La quantification claire des marges de détection, de fusion, de cybernétique et de sécurité signifie que le gel de la conception se fait sur la base de données et non d'intuitions. La simulation de véhicules autonomes déplace donc le risque des derniers sprints de fabrication vers des grappes de calcul abordables. Les projets avancent avec une plus grande prévisibilité et moins de surprises coûteuses.
Comparaison des logiciels de simulation de véhicules autonomes pour la performance en temps réel
La principale différence entre les principales plateformes logicielles de simulation de véhicules autonomes réside dans leur capacité à respecter des délais stricts en temps réel tout en exploitant la physique avancée des capteurs. Les plateformes optimisées pour l'animation haute-fidélité abandonnent parfois le déterminisme, ce qui conduit à des délais non respectés sur les bancs d'essai du matériel. D'autres outils sacrifient les nuances de rendu au profit d'une taille de pas garantie, ce qui limite la profondeur de validation de la perception. Le choix du bon équilibre dépend du budget de latence de votre programme, des modalités des capteurs et des ressources informatiques.
| Logiciel de simulation | Fidélité de la physique à une fréquence d'images élevée | Garantie de latence en temps réel (pas de 1 ms) | Intégration HIL native | Approche en matière d'octroi de licences |
| CARLA | Rendu détaillé du LiDAR urbain et de la caméra ; bibliothèque d'actifs en libre accès | Variable ; typiquement 5-15 ms avec le CPU seul, l'accélération du GPU améliore la situation mais n'est pas déterminante. | Nécessite un logiciel intermédiaire externe pour le couplage HIL | Logiciel libre permissif |
| NVIDIA DRIVE Sim | Dynamique basée sur PhysX ; pipelines de capteurs à suivi de trajectoire | 1 ms réalisable sur le matériel DRIVE dédié ; déterministe sous le contrôle du programmateur | Intégration étroite avec les contrôleurs DRIVE AGX | Propriétaire, lié au matériel |
| IPG CarMaker | Modèle de pneu et de transmission basé sur la physique ; réalisme modéré des capteurs | 1-2 ms déterministe sur x86 standard avec RTOS | Interfaces directes Ethernet et CAN pour HIL | Commercial par siège |
| dSPACE ASM | L'accent est mis sur la dynamique axée sur le contrôle ; les capteurs supplémentaires sont optionnels. | Garantie d'une durée de vie de 1 ms grâce à un système d'exploitation en temps réel et à des FPGA | Couplage natif avec les racks HIL de dSPACE | Licence perpétuelle, basée sur des modules |
Les options libres comme CARLA excellent dans la diversité des scénarios et des actifs générés par la communauté, mais un codage supplémentaire est nécessaire pour les lier aux bancs HIL. Des suites commerciales telles que IPG CarMaker fournissent des programmateurs en temps réel clés en main, accélérant le déploiement lorsque des performances déterministes sont essentielles. Les plates-formes matérielles optimisées des fournisseurs de silicium permettent d'atteindre des taux de trame inégalés, mais les équipes doivent prévoir un budget pour les cartes propriétaires. L'évaluation du coût total de possession, des frais généraux d'intégration et de la maturité de l'assistance vous aide à choisir un outil qui complète votre banc d'essai au lieu de le combattre.
Défis d'ingénierie courants avec les outils de simulation de véhicules autonomes
Même les piles de simulation les plus performantes se heurtent à des obstacles pratiques lorsque les exigences en matière de matériel et de tests augmentent. Ces problèmes ne font souvent surface qu'après des semaines d'essais nocturnes, bloquant les progrès alors que la pression est déjà forte. La reconnaissance précoce des écueils aide les équipes à prendre des mesures d'atténuation avant que les calendriers ne dérapent. Les ingénieurs qui comprennent les obstacles probables peuvent concevoir des plans d'urgence à l'avance.
- Fidélité des actifs et budget GPU : L'augmentation du réalisme des capteurs gonfle le nombre de polygones et la complexité des shaders, atteignant rapidement les limites de la mémoire du GPU. Les ingénieurs doivent trouver un équilibre entre la fidélité et l'homogénéité des images pour éviter de dépasser les délais.
- Dérives de la latence en boucle fermée : Le trafic réseau intense, les mises à jour des pilotes et les interruptions du système d'exploitation hôte peuvent allonger les temps de cycle au-delà des marges de sécurité. Les outils de surveillance qui enregistrent les variations de l'ordre de la microseconde sont essentiels pour une détection précoce.
- Mauvais alignement des versions entre les chaînes d'outils : Des mises à jour mineures des moteurs physiques ou des bibliothèques graphiques peuvent modifier les sorties des capteurs, rompant ainsi les bases de comparaison. L'épinglage sémantique strict des versions permet de conserver des données historiques comparables.
- Stockage massif de données : Les campagnes de perception nocturnes génèrent des téraoctets d'images annotées, ce qui surcharge les systèmes de stockage connectés au réseau. La compression incrémentale et les politiques d'archivage à plusieurs niveaux permettent de gérer les coûts de stockage.
- Difficulté de reproduire des semences aléatoires : Les simulateurs utilisent souvent des acteurs de trafic pseudo-aléatoires, ce qui rend difficile la reproduction de séquences d'accidents exactes. L'enregistrement des valeurs de semences et des versions de moteurs dans les métadonnées d'exécution protège la reproductibilité.
- Modélisation de la corruption des capteurs réels : La cartographie de l'éblouissement des caméras de laboratoire ou de l'efflorescence LiDAR dans les pipelines synthétiques exige un étalonnage méticuleux. Sans artefacts précis, la validation sous-estime les taux d'erreur sur le terrain.
- Contraintes de licence complexes : Les clés verrouillées au niveau des nœuds ou du matériel ralentissent la mise à l'échelle des clusters lors des pics d'utilisation. La planification de licences de rechange à l'avance permet d'éviter l'immobilisation du matériel.
La plupart de ces obstacles sont dus à des compromis d'échelle plutôt qu'à des défauts fondamentaux de la technologie de simulation. L'enregistrement proactif, la programmation déterministe et de solides politiques de gestion des données permettent d'éviter de nombreuses surprises à un stade avancé. Les équipes qui traitent les simulations comme des actifs de production plutôt que comme des outils ad hoc signalent systématiquement des phases de validation plus fluides. La résilience face à ces défis est payante lorsque les audits de certification examinent minutieusement les données et la cohérence des calendriers.
Comment OPAL-RT aide les ingénieurs à réaliser des simulations automobiles avancées
OPAL-RT associe un matériel temps réel éprouvé à un logiciel ouvert, ce qui vous permet de construire et d'adapter des bancs d'essai sans dépendance à l'égard d'un fournisseur. Nos cœurs accélérés par FPGA conservent une précision de l'ordre de la microseconde, même en cas de charge de capteurs de l'ordre du gigabit, protégeant ainsi la stabilité de la boucle de contrôle. RT-LAB unifie les modèles MATLAB/Simulink, FMI et Python, vous permettant d'itérer la fidélité de l'usine tout en préservant l'échelle impériale ou métrique. Les connecteurs cloud intégrés déplacent les cycles de régression nocturnes vers des nœuds de calcul haute performance, réduisant ainsi les files d'attente des laboratoires locaux. Des équipes d'assistance mondiale dotées d'une grande expérience dans le domaine de l'automobile sont prêtes à résoudre les problèmes de synchronisation ou d'E/S lorsque les délais sont serrés.
Les plates-formes HIL des séries OPAL-RT OP6000 et OP7000 comprennent des mezzanines de capteurs modulaires, une synchronisation temporelle de précision et des interrupteurs de défaut automatiques qui s'alignent sur les critères matériels décrits précédemment. Les boîtes à outils d'IA s'interfacent directement avec le banc par le biais d'API Python, ce qui vous permet d'appliquer l'échantillonnage prédictif ou la détection d'anomalies sans intergiciel personnalisé. Des modèles de tarification transparents aident les responsables à prévoir les dépenses d'investissement, tandis que les mises à jour logicielles restent rétrocompatibles pour soutenir des programmes pluriannuels. Des centaines de laboratoires automobiles, Aérospatial et universitaires s'appuient sur ces solutions pour livrer plus rapidement des codes plus sûrs, validant ainsi notre engagement en matière de performance et d'ouverture. Les chefs de file ingénierie choisissent OPAL-RT parce que la précision en temps réel qui a été démontrée renforce la confiance, sécurise les audits et maintient les projets sur la bonne voie.
Questions courantes
Quel est l'objectif des tests de Simulation HIL dans l'ingénierie automobile ?
Les tests de Simulation HIL (HIL) connectent de véritables unités de contrôle électronique à des systèmes de véhicules simulés afin de valider les performances sans avoir besoin de prototypes complets. Ils permettent de détecter rapidement les défauts de conception, d'améliorer l'analyse de régression et de réduire les dépendances de la piste d'essai. Les ingénieurs peuvent évaluer en toute sécurité les cas limites et les scénarios de défaillance dans des conditions contrôlées. Les plates-formes OPAL-RT soutiennent cette démarche grâce à des bancs précis et évolutifs qui permettent de respecter le calendrier de développement et d'auditer les données.
Comment les simulations de véhicules autonomes améliorent-elles le développement à un stade précoce ?
La simulation au cours des premières phases de conception aide les équipes à prévoir comment les algorithmes de contrôle réagissent aux données des capteurs dans divers scénarios de conduite. Cela réduit la dépendance à l'égard des prototypes physiques et permet aux ingénieurs de tester des milliers de cas limites qui ne sont pas réalisables sur un circuit. Cela permet également d'améliorer les décisions relatives à l'agencement des composants et à la mise au point des logiciels avant le début de la phase de construction. OPAL-RT rend cela possible grâce à des jumeaux numériques en temps réel qui fonctionnent parallèlement à vos itérations de conception.
Comment choisir le meilleur matériel HIL pour la simulation automobile ?
Vous avez besoin d'un matériel à faible latence avec des E/S modulaires, une prise en charge native des capteurs et une synchronisation temporelle conçue pour les boucles de contrôle des véhicules. Un comportement déterministe sous charge, une expansion flexible et un débit de données élevé sont des conditions essentielles pour valider les calculateurs et la logique de fusion des capteurs. Recherchez des plateformes qui s'intègrent parfaitement à vos chaînes d'outils existantes. Le matériel OPAL-RT est spécialement conçu pour répondre à ces besoins, aidant les ingénieurs à réaliser des expériences sûres et reproductibles en toute confiance.
Pourquoi la performance en temps réel est-elle importante dans les logiciels de simulation de véhicules autonomes ?
La simulation en temps réel garantit que votre code de contrôle est testé selon des contraintes de temps strictes, reflétant ce qui se passe dans le véhicule réel. Si le simulateur ne respecte pas les délais ou introduit de la gigue, les erreurs liées à la sécurité peuvent passer inaperçues au cours du développement. Maintenir la précision de la synchronisation avec des scènes de haute fidélité est un défi technique que tous les outils ne résolvent pas de la même manière. OPAL-RT comble cette lacune grâce à des moteurs d'exécution en temps réel et à des pipelines de co-simulation de capteurs intégrés.
Comment l'IA peut-elle soutenir mes flux de tests HIL ?
Les outils d'IA permettent d'automatiser la génération de scénarios, la détection des anomalies et la hiérarchisation de la couverture des tests, ce qui accélère le débit des simulations et la découverte des défauts. Ils peuvent également étiqueter automatiquement les données des capteurs, identifier des modèles dans les journaux et prévoir les besoins de maintenance des bancs. Cela permet de réduire la charge de travail manuel et d'améliorer l'efficacité des opérations de laboratoire. Les plateformes OPAL-RT sont prêtes pour l'IA avec des API ouvertes pour prendre en charge ces capacités directement dans votre installation HIL existante.
Des solutions en temps réel dans tous les secteurs
Découvrez comment OPAL-RT transforme les secteurs les plus avancés du monde.

Systèmes d'alimentation
23 juillet 2026
Automatisation des tests de conformité aux codes de réseau pour les centrales équipées d'onduleurs
Les essais de conformité aux codes de réseau pour les parcs d'onduleurs s'appuient sur des études de réseau fragile, des définitions fixes des perturbations, des séquences scriptées reproductibles et des critères structurés de réussite ou d'échec.

Électronique de puissance
22 juillet 2026
Tester les commandes du convertisseur en toute sécurité avant de brancher le matériel
Cette page explique comment l'injection de défauts, les modèles d'installations en boucle fermée et les contrôles de récupération permettent de valider les commandes des convertisseurs avant leur raccordement au matériel.

Systèmes d'alimentation
21/07/2026
Essais de maintien en fonctionnement en cas de baisse de tension pour les onduleurs raccordés au réseau
Guide pratique sur les méthodes d'essai LVRT, la fidélité du profil de chute de tension, les contrôles de protection et la vérification préalable au raccordement pour les onduleurs raccordés au réseau.