CAN/CAN-FD/CANopen
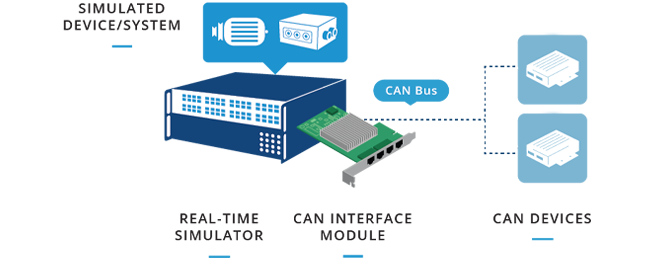
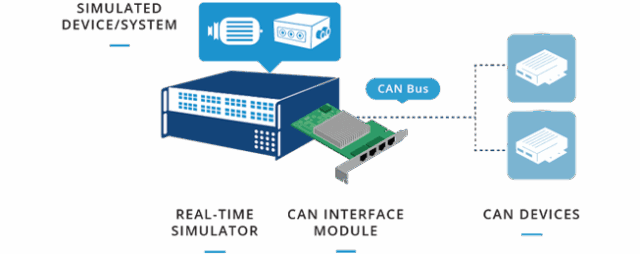
Wir bieten eine integrierte CAN-Lösung mit einer Standard-KVaser 4-Kanal-PCIe-Karte, die es Ihrem Echtzeitsimulator ermöglicht, mit jedem peripheren CAN-Gerät zu interagieren, einschließlich der Unterstützung für CAN-FDFlexibel Data). Der Treiber ist in RT-LAB integriert und Funktionen über eine intuitive Schnittstelle zum Hinzufügen, Definieren und Verwalten von Kanälen, Bussen und Nachrichten.
Erfahren Sie mehr über CAN/CAN-FD/CANopen
Eine integrierte Aufzeichnungsfunktion ermöglicht die Erfassung von Daten während der Simulationen, und vordefinierte CAN-Bus-Architekturen können mit dem CANdb-Import-Tool importiert werden, das mit .dbc- und ARXML-Dateien kompatibel ist. Kanal- und Botschaftsdatenpunkte lassen sich über OpInputs und OpOutputs nahtlos in Ihr Modell einbinden, wobei der CAN-Treiber automatisch initialisiert wird, sobald die Simulation geladen ist.
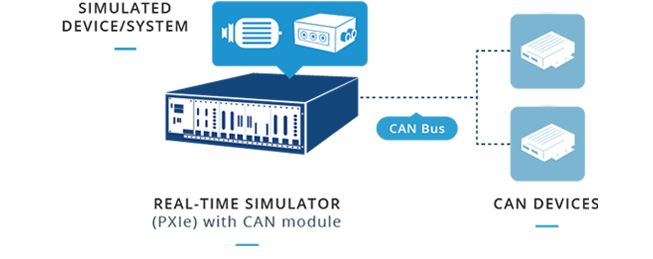
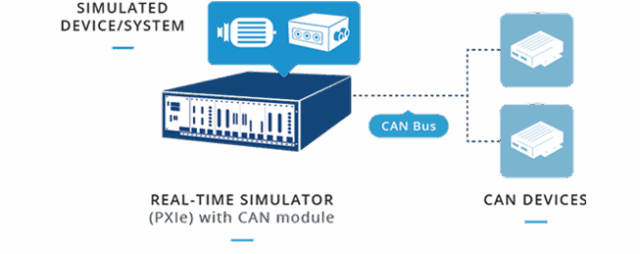
CAN wird auch von der NI-Plattform durch zahlreiche Karten und Module unterstützt. Mit dem NI-XNET-Treiber können Anwender mit externen CAN-Geräten in Echtzeit kommunizieren. Für die Einrichtung der CAN-Architektur stehen FIBEX- (Fieldbus Exchange Format) oder .dbc-Dateien zur Verfügung.
Für das CANopen-Protokoll auf RT-LAB wird eine GATEWAY-Lösung durch das Anybus X-Gateway CANopen bereitgestellt. Diese Einrichtung ermöglicht die Kommunikation mit peripheren CANopen-Geräten, wobei der OPAL-RT-Simulator mit dem Gateway über das Modbus-Protokoll über Ethernet verbunden ist, während das Anybus-Gateway das CANopen-Signal über einen DB9-Anschluss überträgt.
Über CAN-Bus
CAN ist ein robustes Protokoll, das in der Automobilindustrie weit verbreitet ist und es Mikrocontroller-Geräten ermöglicht, mit einem Master- oder Host-Gerät zu kommunizieren. Als nachrichtenbasiertes Protokoll ermöglicht CAN den Slave-Geräten, Nachrichten zu interpretieren und sie in spezifische Aktionen umzusetzen. Die Nachrichten werden sequentiell über den gesamten CAN-Bus gesendet, der die Master- und Slave-Geräte miteinander verbindet.
Plattform-Kompatibilität
RESSOURCEN
Produktführer
Informieren Sie sich über unsere Kommunikationsprotokolle, durchsuchen Sie Produktlisten und greifen Sie auf die Benutzerdokumentation zu.
FAQ
Finden Sie die Antworten auf Ihre Fragen
Was ist der Unterschied zwischen CAN und CAN FD, und wie unterstützt OPAL-RT beide?
CAN und CAN FDFlexibel Data-rate) sind Kommunikationsprotokolle, die in Echtzeitsteuerungssystemen weit verbreitet sind. CAN FD bietet eine schnellere Datenübertragung und größere Nutzlasten als Standard-CAN. Wir unterstützen sowohl CAN als auch CAN FD durch einen integrierten Treiber in RT-LAB, der mit Kvaser- und NI-Plattformen kompatibel ist und eine nahtlose Simulation und Tests beider Protokolle ermöglicht.
Wie integriert OPAL-RT CANopen CAN FD in Echtzeitsimulationen?
Wir ermöglichen die Integration von CANopen CAN FD durch das Anybus X-Gateway, das die Modbus-over-Ethernet-Kommunikation zwischen dem Simulator und externen CANopen-Geräten ermöglicht. Dieses Setup unterstützt die FD-CAN-Kommunikation über einen DB9-Anschluss und bietet eine zuverlässige Lösung für Tests CANopen-Geräten mit CAN FD-Protokoll.
Welche hardware und Treiber werden für CAN FD- und CANopen-Anwendungen unterstützt?
Wir unterstützen CAN FD und CANopen mit Kvaser 4-Kanal-PCIe-Karten und NI-XNET-Treibern auf der NI-Plattform. Diese Optionen ermöglichen die Echtzeitkommunikation mit externen CAN-FD-Geräten und volle Kompatibilität mit der CAN-Technologie, einschließlich Unterstützung von CAN-Transceivern und CAN-FD-basierter Nachrichtenverarbeitung.
Kann ich bestehende CAN CAN FD Busarchitekturdateien mit OPAL-RT verwenden?
Ja, wir unterstützen den Import von vordefinierten CAN-CAN-FD-Architekturen mit dem Werkzeug CANdb Import. Mit diesem Werkzeug können Anwender mit Standard-DBC- und ARXML-Dateien für CAN- und FD-CAN-Simulationen arbeiten und so die Integration mit bestehenden CAN-Technologiemodellen und -Netzwerken vereinfachen.
Wie handhabt OPAL-RT den Datenaustausch und die Steuerung über das CAN FD Protokoll?
Unsere CAN-FD-Lösung umfasst eine intuitive Schnittstelle zur Definition von Kanälen und Nachrichten, die über OpInputs und OpOutputs direkt mit Simulationsmodellen verbunden sind. Das System gewährleistet eine präzise Echtzeit-Datenverarbeitung unter Verwendung des CAN-FD-Protokolls, mit Unterstützung für die Aufzeichnung von CANFD-Nachrichten und Kompatibilität mit modernen CAN-Transceivern.

Benötigen Sie technischen Support?
Wir helfen Ihnen, das Potenzial Ihres Systems voll auszuschöpfen. Besuchen Sie das Support-Zentrum , um unsere umfangreichen Support-Ressourcen zu erkunden, oder fordern Sie persönliche unterstützen an, damit Ihr System reibungslos läuft.