CAN/CAN-FD/CANopen
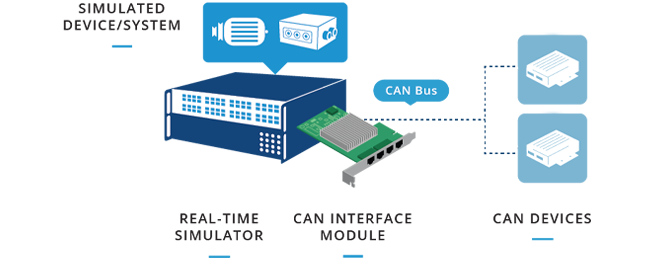
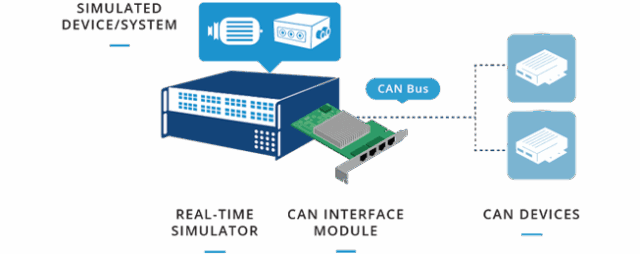
We offer an integrated CAN solution using a standard KVaser 4-Channel PCIe card, enabling your real-time simulator to interface with any peripheral CAN device, with support for CAN-FD (Flexible Data) included. The driver is built into RT-LAB and features an intuitive interface for adding, defining, and managing channels, buses, and messages.
Learn more about CAN/CAN-FD/CANopen
A built-in recording feature allows users to capture data throughout simulations, and pre-defined CAN bus architectures can be imported using the CANdb Import tool, compatible with .dbc and ARXML files. Channel and message data points connect seamlessly to your model via OpInputs and OpOutputs, with the CAN driver initializing automatically once the simulation loads.
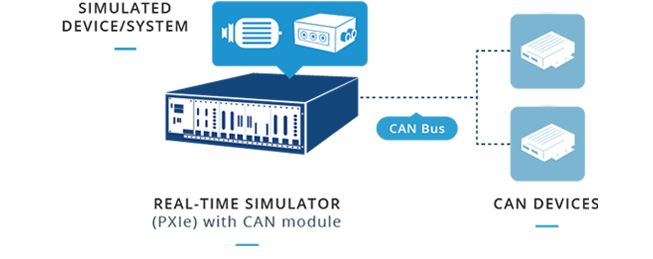
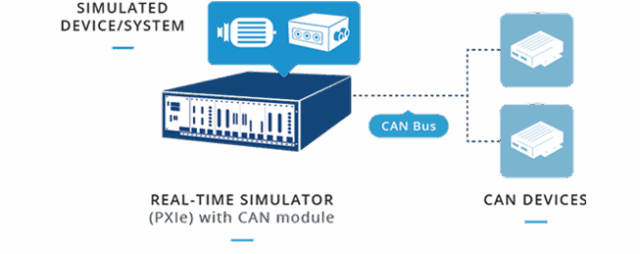
CAN is also supported on the NI Platform through a range of cards and modules. Using the NI-XNET driver, users can communicate with external CAN devices in real time, with FIBEX (Fieldbus Exchange Format) or .dbc files available for CAN architecture setup.
For CANopen protocol on RT-LAB, a GATEWAY solution is provided through the Anybus X-gateway CANopen. This setup allows communication with peripheral CANopen devices, with the OPAL-RT simulator interfacing with the gateway via Modbus protocol over Ethernet, while the Anybus gateway transmits the CANopen signal through a DB9 connector.
About CAN bus
CAN is a robust protocol widely used in the automotive industry, enabling microcontroller devices to communicate with a master or host device. As a message-based protocol, CAN allows slave devices to interpret messages and translate them into specific actions. Messages are sent sequentially across the entire CAN bus, the architecture linking master and slave devices.
Platform compatibility
RESOURCES
Product guide
Explore our communication protocols, browse product lists, and access user documentation.
FAQ
Find the answers to your questions
What is the difference between CAN and CAN FD, and how does OPAL-RT support both?
CAN and CAN FD (Flexible Data-rate) are communication protocols widely used in real-time control systems. CAN FD offers faster data transmission and larger payloads than standard CAN. We support both CAN and CAN FD using a built-in driver within RT-LAB, compatible with Kvaser and NI platforms, enabling seamless simulation and testing of both protocols.
How does OPAL-RT integrate CANopen CAN FD into real-time simulations?
We enable CANopen CAN FD integration through the Anybus X-Gateway, allowing Modbus-over-Ethernet communication between the simulator and external CANopen devices. This setup supports FD CAN communication via a DB9 connector, providing a reliable solution for testing CANopen devices using CAN FD protocol.
What hardware and drivers are supported for CAN FD and CANopen applications?
We support CAN FD and CANopen using Kvaser 4-Channel PCIe cards and NI-XNET drivers on the NI platform. These options enable real-time communication with external CAN FD devices and full compatibility with CAN technology, including CAN transceiver support and CAN-FD-based message handling.
Can I use existing CAN CAN FD bus architecture files with OPAL-RT?
Yes, we support importing predefined CAN CAN FD architectures using the CANdb Import tool. This tool allows users to work with standard .dbc and ARXML files for both CAN and FD CAN simulations, streamlining integration with existing CAN technology models and networks.
How does OPAL-RT handle data exchange and control using the CAN FD protocol?
Our CAN-FD solution includes an intuitive interface for defining channels and messages, connecting directly to simulation models via OpInputs and OpOutputs. The system ensures precise real-time data handling using the CAN FD protocol, with support for CANFD message recording and compatibility with advanced CAN transceivers.

Need technical support?
We’re dedicated to helping you maximize the potential of your system. Visit the support center to explore our extensive support resources, or request personalized help to keep your system running smoothly.