
LIN
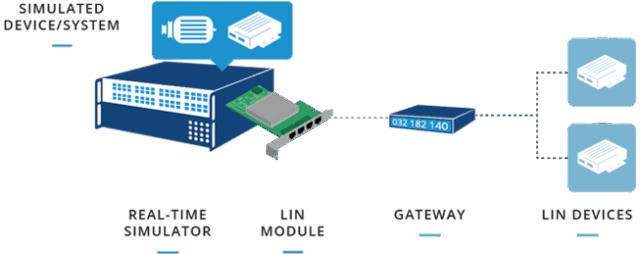
Unsere LIN-Protokolllösung ist sowohl für NI- als auch für RT-LAB-Plattformen verfügbar. Für die RT-LAB-Plattform ist ein Gateway-Gerät erforderlich, um ein LIN-Gerät mit einem CAN-Port auf einem OPAL-RT-Simulator zu verbinden. Dieses Gateway wandelt LIN-Nachrichten in CAN-Nachrichten um und umgekehrt, so dass der OPAL-RT-Echtzeitsimulator mit einem LIN-Gerät in verschiedenen Konfigurationen, wie RCP oder HIL, kommunizieren kann.
Erfahren Sie mehr über LIN
LIN ist ein Protokoll mit einem Master-Gerät und einem oder mehreren Slaves, bei dem der Master alle Nachrichten sendet und nur ein Slave auf jeden Nachrichtenidentifikator antwortet. Da der Master die Kommunikation initiiert, wird in der Busbeschreibung ein Zeitplan festgelegt, so dass keine Kollisionserkennung erforderlich ist. LIN ist für seine Kosteneffizienz bekannt und wird in der Automobilindustrie häufig für die Kommunikation zwischen Fahrzeugkomponenten eingesetzt.
Wir empfehlen die IXXAT FRC-EP 170 oder 190 Gateways, die eine bidirektionale Protokollkonvertierung mit Hilfe der Software von IXXAT unterstützen. Der Anwender kann seine LIN-Beschreibungsdatei (LDF) auf das IXXAT-Gerät hochladen, das diese in eine CAN-DBC-Datei konvertiert, so dass eine einheitliche Beschreibung der Kommunikationsbusarchitektur für beide Protokolle möglich ist.
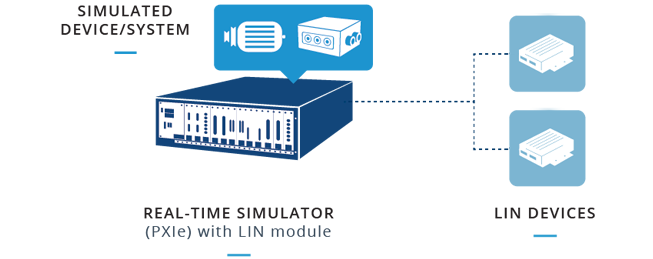
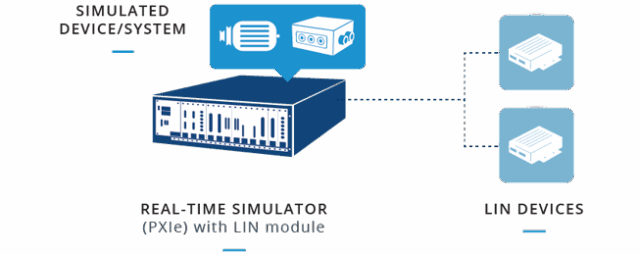
Auf der PXI-Plattform von NI werden zahlreiche kompatible Karten und Module unterstützt, die die LIN-Versionen 1.3, 2.0 und 2.1 abdecken. Mit dem NI-XNET-Treiber können Anwender eine Echtzeitkommunikation mit externen LIN-Geräten aufbauen. Die LIN-Bus-Architektur sowie das Zeitschema der Nachrichten können in VeriStand angepasst werden.
Plattform-Kompatibilität
RESSOURCEN
Produktführer
Informieren Sie sich über unsere Kommunikationsprotokolle, durchsuchen Sie Produktlisten und greifen Sie auf die Benutzerdokumentation zu.
FAQ
Finden Sie die Antworten auf Ihre Fragen
Was ist das LIN-Protokoll und wie wird es in der Echtzeitsimulation eingesetzt?
Das LIN-Protokoll (Local Interconnect Network) ist ein kostengünstiges Single-Master/Multi-Slave-Kommunikationsprotokoll, das in der Automobilindustrie weit verbreitet ist. Wir unterstützen das LIN-Kommunikationsprotokoll sowohl über RT-LAB- als auch über NI-Plattformen für den Einsatz in Hardware(HIL) und Rapid Control Prototyping (RCP) Simulationen.
Wie ermöglicht OPAL-RT die Integration von CAN- und LIN-Protokollen?
Wir unterstützen die Integration von CAN- und LIN-Protokollen durch den Einsatz eines Gateway-Geräts, das LIN-Nachrichten in CAN-Nachrichten umwandelt und umgekehrt. Dies ermöglicht eine nahtlose Kommunikation zwischen LIN-Geräten und unseren Echtzeitsimulatoren über die CAN-Schnittstelle.
Was sind die wichtigsten Anwendungen des LIN Automotive Protokolls in OPAL-RT Systemen?
Das LIN-Automotive-Protokoll wird hauptsächlich zum Testen und Simulieren der Kommunikation zwischen Fahrzeugkomponenten wie Steuergeräten und Sensor-und Datenfusion verwendet. Unsere Plattformen ermöglichen es Ingenieur:innen , diese Systeme in Echtzeit mit HIL- und RCP-Konfigurationen zu validieren.
Wie ist das LIN-Schnittstellenprotokoll auf den OPAL-RT Plattformen implementiert?
Bei RT-LAB wird das LIN-Schnittstellenprotokoll über ein Gateway unterstützt, das LIN mit einem CAN-Port verbindet. Auf NI-PXI-Plattformen wird der LIN-Bus über NI-XNET-Treiber und kompatible hardware verwaltet, was Tests und -steuerung mit VeriStand ermöglicht.
Welche Rolle spielt die LIN-Beschreibungsdatei (LDF) in OPAL-RT Simulationen?
Die LIN-Beschreibungsdatei (LDF) definiert das Timing und die Nachrichtenstruktur des LIN-Busses. Unsere Lösung ermöglicht es dem Anwender, die LDF auf das IXXAT-Gateway hochzuladen, das sie in eine CAN-DBC-Datei konvertiert und damit die Konfiguration sowohl für LIN- als auch für CAN-Systeme vereinfacht.

Benötigen Sie technischen Support?
Wir helfen Ihnen, das Potenzial Ihres Systems voll auszuschöpfen. Besuchen Sie das Support-Zentrum , um unsere umfangreichen Support-Ressourcen zu erkunden, oder fordern Sie persönliche unterstützen an, damit Ihr System reibungslos läuft.