
LIN
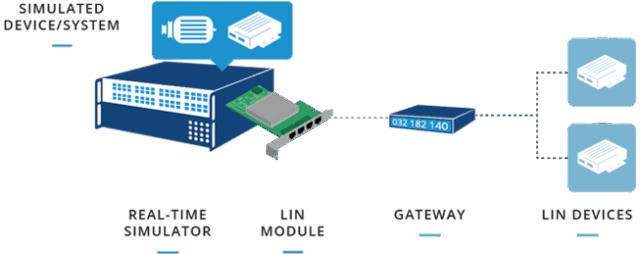
Notre solution de protocole LIN est disponible sur les plateformes NI et RT-LAB. Pour la plateforme RT-LAB, une passerelle est nécessaire pour relier un dispositif LIN à un port CAN sur un simulateur OPAL-RT. Cette passerelle convertit les messages LIN en messages CAN et vice versa, permettant au simulateur temps réel OPAL-RT de communiquer avec un périphérique LIN dans diverses configurations, telles que RCP ou HIL.
En savoir plus sur LIN
LIN est un protocole avec un dispositif maître et un ou plusieurs esclaves, dans lequel le maître envoie tous les messages et un seul esclave répond à chaque identifiant de message. Comme c'est le maître qui initie la communication, un calendrier est établi dans la description du bus, ce qui supprime le besoin de détection des collisions. Connu pour sa rentabilité, le LIN est largement utilisé dans l'industrie automobile pour la communication entre les composants d'une voiture.
Nous recommandons les passerelles IXXAT FRC-EP 170 ou 190, qui supportent la conversion bidirectionnelle de protocole en utilisant le logiciel ACT d'IXXAT. Les utilisateurs peuvent télécharger leur fichier de description LIN (LDF) vers le dispositif IXXAT, qui le convertit en un fichier CAN DBC, permettant une description unifiée de l'architecture du bus de communication à travers les deux protocoles.
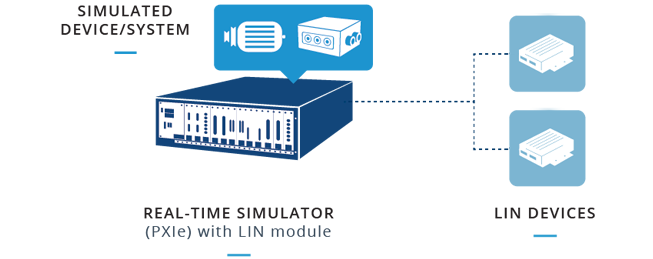
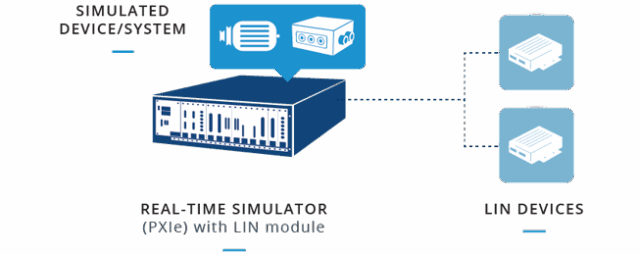
Sur la plateforme NI PXI, le support est assuré par une gamme de cartes et de modules compatibles, couvrant les versions LIN 1.3, 2.0 et 2.1. En utilisant le pilote NI-XNET, les utilisateurs peuvent établir une communication en temps réel avec des périphériques LIN externes. L'architecture du bus LIN, ainsi que le calendrier des messages, peuvent être personnalisés dans VeriStand.
compatibilité de la plateforme
RESSOURCES
Guide des produits
Découvrez nos protocoles de communication, parcourez les listes de produits et accédez à la documentation utilisateur.
FAQ
Trouvez les réponses à vos questions
Qu'est-ce que le protocole LIN et comment est-il utilisé dans la simulation en temps réel ?
Le protocole LIN (Local Interconnect Network) est un protocole de communication maître/multi-esclave rentable, largement utilisé dans les applications automobiles. Nous supportons le protocole de communication LIN à travers les plateformes RT-LAB et NI pour une utilisation dans les simulations Simulation HIL (HIL) et le prototypage rapide de contrôle (RCP).
Comment OPAL-RT permet-il l'intégration des protocoles CAN et LIN ?
Nous prenons en charge l'intégration des protocoles CAN et LIN en utilisant un dispositif de passerelle qui convertit les messages LIN en messages CAN et vice versa. Cela permet une communication transparente entre les dispositifs LIN et nos simulateurs en temps réel via l'interface CAN.
Quelles sont les principales applications du protocole automobile LIN dans les systèmes OPAL-RT ?
Le protocole automobile LIN est principalement utilisé pour tester et simuler la communication entre les composants d'un véhicule, tels que les calculateurs et les capteurs. Nos plateformes permettent aux ingénieurs de valider ces systèmes en temps réel en utilisant des configurations HIL et RCP.
Comment le protocole d'interface LIN est-il mis en œuvre sur les plates-formes OPAL-RT ?
Sur RT-LAB, le protocole d'interface LIN est pris en charge par une passerelle qui relie LIN à un port CAN. Sur les plateformes NI PXI, le bus LIN est géré par des pilotes NI-XNET et du matériel compatible, ce qui permet de tester et de contrôler en temps réel à l'aide de VeriStand.
Quel rôle joue le fichier de description LIN (LDF) dans les simulations OPAL-RT ?
Le fichier de description LIN (LDF) définit la synchronisation et la structure des messages du bus LIN. Notre solution permet aux utilisateurs de télécharger le LDF vers la passerelle IXXAT, qui le convertit en un fichier CAN DBC, facilitant ainsi la configuration des systèmes LIN et CAN.

Besoin d'une assistance technique ?
Nous nous engageons à vous aider à maximiser le potentiel de votre système. Visitez le centre d'assistance pour découvrir nos vastes ressources d'assistance, ou demandez une aide personnalisée pour que votre système fonctionne sans problème.