内容
积累专业知识
我们的电气和机器人系统课程利用 OPAL-RT 的课件作为虚拟实验室,提供实践经验,加深对每个主题的理解。了解本课程的内容,深入了解您将取得的成果。
01
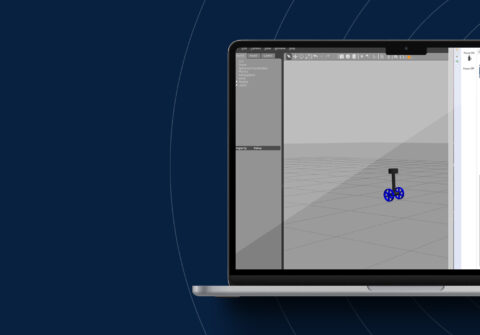
三维平面水平机器人
02
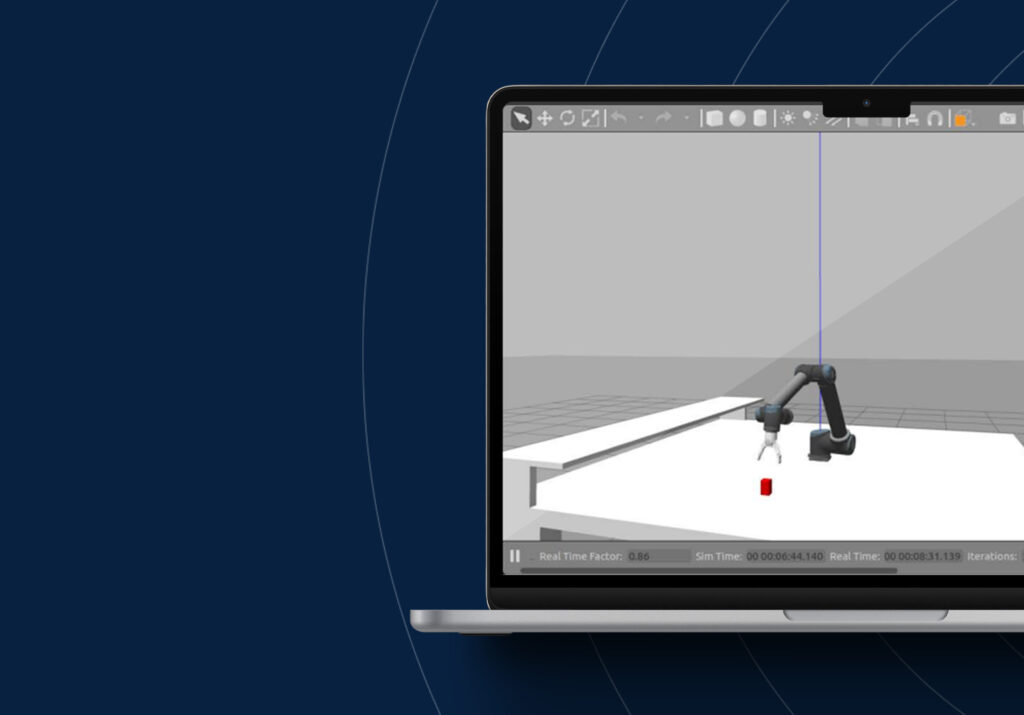
六自由度空间解耦机械手 - FANUC LRMate 200 iC
03
六自由度空间非解耦机械手 - UR10e
形式
按需选择适合您的培训形式
在线远程培训
通过视频会议形式进行,为学员提供高度灵活的参与方式。


内容
我们的电气和机器人系统课程利用 OPAL-RT 的课件作为虚拟实验室,提供实践经验,加深对每个主题的理解。了解本课程的内容,深入了解您将取得的成果。
01
02
03
形式
通过视频会议形式进行,为学员提供高度灵活的参与方式。