A complete guide to military vehicle simulators for defense engineers
Simulation
08 / 21 / 2025

You accept no compromise when crew safety and tactical advantage ride on every line of code. Every subsystem, from the diesel‑electric drive to the counter‑UAS radar, carries the weight of mission success. Yet conducting full‑scale trials for each software release drains time, budget, and precious hardware hours. Precise, repeatable, and high‑fidelity virtual runs bridge that gap, letting you fine‑tune tactics while the vehicle remains safely parked.
Advances in processors, high‑speed communication backplanes, and physics‑based solvers now let engineering teams recreate battle conditions with millisecond accuracy. A cockpit map display can flicker under electronic attack, armour can flex under shaped‑charge impact, and autonomous convoy behaviour can be stressed by complex roadblocks, all inside a single rack of compute hardware. That capability not only trims costs but also frees engineers to explore riskier concepts without jeopardizing crew or equipment. Such digital replication has moved from a nice‑to‑have research capability to a frontline engineering necessity.
Why military vehicle simulation is essential to defense system testing
Military vehicle simulation compresses months of proving‑ground activity into hours in the lab. Instead of waiting for varied climate or terrain, you can cycle through desert heat, arctic chill, and urban rubble at the click of a scenario file. Weapon integration teams can verify recoil forces, sensor blackout periods, and stabilizer feedback without firing a single round. That breadth of coverage dramatically boosts confidence when the hardware eventually meets physical obstacles.
Beyond functional verification, a high‑fidelity simulator reveals subtle timing issues hidden by network indeterminacy. Engineers can inspect packet‑level delays between the vehicle management computer and remote weapon station during complex manoeuvres. That visibility shortens debug cycles because faults surface early, while code is still modular and more flexible to adjust. With fewer late‑stage surprises, procurement officers see smoother acceptance milestones and lower sustainment costs.
How military vehicle simulators improve safety and mission readiness

A military vehicle simulator turns uncertain field risks into controllable variables. You dictate weather intensity, jammer strength, and logistics constraints, pushing crews and algorithms well past normal training limits. Failures that would endanger life or equipment remain digital artefacts, visible on dashboards yet harmless to metal and flesh. The result is a more resilient force prepared to respond when conditions deviate from script.
Preventing crew injury during high‑risk manoeuvres
Rollovers, brake failures, and improvised explosive device (IED) blasts generate forces no human volunteer should experience for test purposes. A simulator couples multibody dynamics with occupant models to predict spinal compression and helmet acceleration. Engineers iterate restraint geometry and seat dampers until predicted loads stay within survivability thresholds. That work completes long before a driver ever straps in.
The same model also logs fuselage deformation and sensor blackout intervals, data points that guide design changes to hull framing and situational awareness suites. Because every simulation run is traceable, safety certification boards receive quantitative evidence rather than anecdotal accounts. This audit trail accelerates sign‑off while building trust across engineering, safety, and command stakeholders. Fewer late‑stage hardware modifications mean fewer schedule slips and lower retrofit expenses.
Reducing live‑fire exposure through virtual scenarios
Live ammunition tests remain expensive due to range fees, ammunition cost, and crew scheduling. A military vehicle simulator replicates ballistic trajectories, fragmentation patterns, and armour penetration physics validated against standard terminal ballistics tables. Engineers tweak material lay‑ups, reactive armour timing, and smoke‑grenade sequencing without sending personnel near hot rounds. Gun crews still gain proficiency because fire‑control algorithms and user interface logic match the deployed platform.
Range usage drops, yet quality of data improves thanks to high‑resolution logging unattainable with blast‑proof dataloggers. Command staff can combine simulation outputs with combat modelling tools to evaluate survivability against emerging threats. This approach informs procurement choices such as selecting anti‑missile countermeasures or allocating funds for active protection upgrades. Ultimately, operational planning benefits from richer evidence and sharper risk assessment.
Reinforcing crew coordination under complex multi‑domain threats
Modern missions rarely involve a single vehicle acting alone. Convoys must communicate with unmanned aerial vehicles, electronic warfare units, and forward observers while manoeuvring under fire. A simulator recreates network latency, radio frequency congestion, and dynamic tasking orders using distributed simulation protocols. That interplay forces crews to practise mission command procedures under cognitive load.
After‑action review tools capture voice traffic, control inputs, and geo‑position data for precise debriefs. Patterns of hesitation or miscommunication surface plainly, allowing trainers to refocus standard operating procedures. Because simulation time is inexpensive, units repeat scenarios until coordination meets doctrinal standards. Confidence grows as crews internalize proper call‑and‑response tempos and escalation triggers.
Streamlining maintenance training for advanced propulsion systems
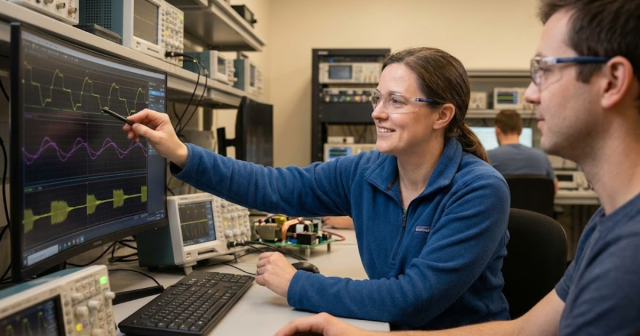
Hybrid diesel‑electric drivetrains introduce high‑voltage subsystems unfamiliar to many maintainers. A simulator presents interactive fault trees linked to virtual oscilloscopes and diagnostic connectors, letting technicians practise lock‑out tag‑out procedures. They trace current spikes, isolate inverter faults, and rehearse battery module replacements without touching live circuits. Hands‑on familiarity builds well before the first service call arrives.
Digital logs track each trainee’s diagnostic path and tool selection choices. Supervisors identify misunderstandings quickly and assign remedial modules targeted at specific knowledge gaps. Fewer errors occur once maintainers transition to physical depots, reducing downtime for operational fleets. Mission availability rises, freeing combat‑ready vehicles for tasking.
Safety gains start with credible physics and comprehensive scenario coverage. Mission readiness improves because every stake‑holder, from gunners to mechanics, touches the same authoritative data set. Virtual rehearsal converts risk into insight but keeps people and assets intact. When crews meet real danger, their muscle memory already accounts for the extremes.
Common simulation methods used in autonomous military vehicle development
Autonomous military vehicles rely on complex perception, planning, and control loops that must function amid clutter and hostile interference. Military vehicle simulation offers a controlled sandbox for stressing each algorithm path without risking a stalled convoy. Teams swap sensor payloads, experiment with convoy spacing, and test teleoperation fall‑backs under variable communications quality. These methods provide the statistical coverage required for safety certification while preserving schedule headroom.
- Physics‑based terrain modelling: The simulator computes soil deformation, slip ratios, and obstacle clearance in real time to approximate mobility performance across mud, snow, and rubble. Sensor feeds match vehicle pose, letting perception stacks correctly fuse inertial measurement unit (IMU) and wheel encoder data.
- Synthetic sensor generation: The engine produces lidar point clouds, millimetre‑wave radar returns, and electro‑optical images with noise models matched to procurement specifications. This feed trains neural networks and validates detection ranges under obscurants like dust or smoke.
- Behaviour‑driven traffic agents: Autonomous convoys meet civilian cars, dismounted infantry, and unexpected wildlife controlled by behaviour trees and reinforcement learning scripts. These agents introduce edge cases such as unpredictable braking or lane encroachment.
- Digital twin alignment: Vehicle health management modules reference a high‑fidelity virtual replica synced with telemetry from earlier field tests. Parameter updates maintain correlation, improving predictive maintenance accuracy for future sorties.
- Hardware‑in‑the‑loop integration: Controllers, actuators, and sensor front‑end boards connect over real bus interfaces such as Controller Area Network (CAN) FD and Time‑Sensitive Networking (TSN). Closed‑loop execution exposes timing jitter, bus saturation, and processor load spikes before code hits production builds.
OPAL‑RT platforms use real-time, FPGA-based simulation to keep voltage transients and switching events visible, measurable, and tunable.
Each method targets a unique slice of autonomy risk, from perception ambiguity to actuator latency. Using them in concert raises statistical confidence that radars, cameras, and decision logic will not stumble when stakes soar. Controlled iteration maintains stable programme costs because missteps surface in virtual space instead of welded hulls. As feature roadmaps expand, engineers can layer new modules atop these baseline methods without rewriting foundational models.
Ways defense simulation tools reduce risk and accelerate prototyping

Budget pressure remains relentless across procurement offices, yet untested hardware carries unacceptable hazard. Defense simulation offers a route to cut exposure while still gathering the evidence certification boards require. Teams refine architecture, verify interfaces, and push stress cases beyond what a single test range could stage. Prototypes mature faster because engineers spend less time waiting for range time and more time analysing precise logs.
- Early concept validation: Engineers check feasibility of new suspension geometries or turret layouts against physics constraints before releasing manufacturing drawings. This filter reduces costly re‑spins.
- Virtual subsystem integration: Software teams connect powertrain control, active suspension, and electronic warfare suites on a common timing backbone inside the simulator. Interface mismatches surface immediately, saving days of wire harness rework.
- Automated regression testing: Continuous integration servers trigger hundreds of simulation runs overnight whenever code changes. Failures generate detailed reports that developers address long before hardware‑in‑the‑loop sessions.
- Risk‑based scenario prioritization: The toolchain ranks mission threads by likelihood and consequence, focusing resources on the combinations that drive safety credits. Less critical paths still receive coverage via stochastic sampling.
- Supplier collaboration portals: Third‑party component vendors access secure, partitioned versions of the simulation to validate firmware without shipping confidential schematics. Integration confidence rises and contracting friction drops.
Each practice chips away at uncertainty, letting stakeholders commit funds with eyes wide open. Prototype vehicles reach rolling‑chassis status sooner because developers converge on stable baseline software earlier. Defence ministries notice improved schedule predictability and fewer budget overruns. Simulation therefore serves as both technical microscope and programme insurance policy.
How hardware‑in‑the‑loop testing enhances military vehicle simulation accuracy
Purely software models cannot replicate every nuance of electromagnetic interference, thermal drift, or quantization noise. Hardware‑in‑the‑loop (HIL) closes that gap by inserting actual sensors, control boards, and actuators into the military vehicle simulation loop. Defense simulation frameworks then exercise physical boards at realistic data rates, logging behaviour in lockstep with the virtual vehicle. This synergy keeps models honest while revealing failure modes that analytic equations overlook.
Closing the timing gap between model and hardware
Latency budgets within fly‑by‑wire or drive‑by‑wire stacks rarely exceed a few milliseconds. A HIL bench enforces those limits by forcing firmware to respond to synthetic sensor packets at the exact pace expected later on the battlefield. Any extra buffering or garbage collection pause shows up as missed interrupts long before the vehicle moves under its own power. Engineers refactor scheduler settings until timing margins remain healthy under worst‑case loads.
This timing validation prevents race conditions, watchdog resets, or unexpected actuator commands once hardware meets high‑g manoeuvres. Crews avoid dangerous surges or steering jitter, while certification teams gain clear evidence of deterministic response. The project avoids costly redesigns centred around higher‑end microcontrollers simply because inefficient code hid inside the original build. Timely insight translates to lighter bill of materials and lower power draw.
Validating control firmware under edge‑case loads
Edge cases like alternating wheel‑slip on icy ruts or power‑bus brownouts rarely occur on schedule at a test track. HIL injects those conditions by skewing feedback loops or interrupting voltage rails during the simulation. Firmware logic responds in real time, allowing observers to verify graceful degradation rather than catastrophic stop. Diagnostic hooks collect variable traces for immediate replay.
Once patterns of unsafe behaviour appear, developers adjust control law gains, watchdog thresholds, or fallback routines. Updated binaries return to the bench within minutes, shortening cycles that previously required new track reservations. The final product exhibits higher tolerance to mechanical or electrical surprises. Operational commanders therefore allocate fewer contingency resources.
Capturing high‑frequency power electronics dynamics
Electric turrets and hybrid propulsion systems switch hundreds of amperes at kilohertz rates. Standard solver time steps struggle to keep up, risking aliasing that masks short‑circuit spikes or thermal runaway. HIL rigs pair field‑programmable gate array (FPGA) processors with real power modules to reproduce those waveforms accurately. Current sensors and gate drivers run under operational voltage, letting analysts verify efficiency and stress margins.
Measurements align with field test data to within tight tolerance, confirming that the joint model‑hardware setup remains trustworthy. Optimised commutation patterns that cut heat load by a few degrees Celsius emerge long before first prototype batteries degrade. Resulting energy savings extend range or dwell time for surveillance missions. Lower thermal stress also extends component service life, trimming sustainment budgets.
Scaling to platoon‑level interaction
Future doctrines anticipate mixed convoys containing crewed and autonomous ground vehicles, each with dozens of control units. A single HIL bench cannot accommodate that device count, so multiple racks link through time‑synchronised middleware. The entire platoon behaves as a coherent war‑fighting element, including inter‑vehicle communication jitter and command‑and‑control hierarchy. Developers test formation logic, collision avoidance, and bandwidth allocation under simulated spectrum saturation.
Because hardware devices stay in sync down to microsecond resolution, emergent behaviours like queue oscillation or sensor crosstalk appear faithfully. Engineers tune convoy spacing, route selection heuristics, and radio‑frequency hop patterns for smooth traffic flow. When the formation eventually enters a proving ground, fine adjustments, not major corrections, dominate the schedule. More predictable field tests mean lower per‑hour cost and richer data capture.
HIL bridges the last mile between code and steel, grounding abstract models in electrical reality. Accurate timing, genuine power electronics, and scalable multi‑vehicle links combine to shrink technical uncertainty. Programme planners gain repeatable evidence that control stacks behave under stress, supporting milestone clearance. Mission commanders ultimately receive vehicles that act exactly as the specification claims.
Simulation use cases across tactical and strategic defense vehicle systems
Simulation use cases span from reconnaissance drones to missile launcher cooling, all validated before hardware ever moves.
Military vehicle simulation addresses needs well beyond armoured troop carriers. Every echelon benefits, from reconnaissance drones hitching rides on utility trucks to heavy transporter‑erector‑launchers for theatre‑level assets. Different missions impose distinct constraints on mobility, survivability, and networking. Simulation adapts by adjusting fidelity where it matters, conserving compute cycles for critical phenomena.
- Reconnaissance light armoured vehicle route planning: Terrain and sensor models predict sight lines, acoustic exposure, and cover availability along patrol routes. Commanders allocate observation posts based on these analytics.
- Amphibious assault vehicle surf‑zone entry: Coupled fluid‑structure solvers evaluate hull slamming loads and propulsion choking in breaking surf. Naval planners pick suitable beaches without risking hull breaches.
- Heavy transport tank retriever towing dynamics: Multibody chains analyse drawbar forces and brake fade when towing disabled main battle tanks up steep grades. Field recovery teams adjust gear selection and cooling intervals accordingly.
- Long‑range artillery resupply convoy timing: Stochastic traffic models combine with blue‑force tracking algorithms to project fuel and ammunition arrival within narrow fire‑support windows. Logistics officers adjust dispatch order to maintain tempo.
- Strategic missile launcher thermal signature management: Computational fluid dynamics evaluates exhaust plume mixing and panel cooling to keep infrared signature below detection thresholds. Doctrine writers update hide‑site selection guides using this data.
Each scenario reflects a different balance of weight, speed, and signature management priorities. Simulation covers that spectrum without tearing down the lab between projects. Engineers reuse verified component libraries yet still match mission‑specific physics. This flexibility guards budgets while still meeting force‑generation deadlines.
What to consider when choosing a military vehicle simulator platform
Selecting the right military vehicle simulator affects every downstream test campaign. A hasty choice can trap teams behind proprietary interfaces or fixed‑rate solvers that throttle ambition. Conversely, a well‑matched platform scales from embryonic research to acceptance trials. Deliberate evaluation across technical and organisational factors avoids painful migrations later.
Fidelity and frame rate requirements
Start by cataloguing subsystems that require microsecond‑level accuracy, such as turret stabilizers or traction inverters. If the solver cannot meet those time steps, error accumulation will pollute results regardless of other features. Benchmark latency under full load, not vendor marketing slides. Remember that perception stacks may tolerate lower update rates than motor drives, so mixed‑granularity execution could save cost.
A platform that partitions high‑speed loops onto FPGA fabric while leaving path planning on central processing units (CPUs) balances performance and price. Look for proven case studies showing sustained real‑time execution under your expected model size. Ask vendors for open test scripts so your team can replicate claims inside its own lab. Transparent evidence builds trust across procurement, safety, and finance offices.
Open architecture and toolchain compatibility
Engineers already rely on modelling toolsets such as MATLAB/Simulink, Modelica, and Python. A rigid simulator that forces translation into a proprietary format introduces needless friction. Support for Functional Mock‑up Interface (FMI) standard, Time‑Sensitive Networking, and cloud orchestration protects future investments. Exporting logs in standard Parquet or comma‑separated values (CSV) formats simplifies downstream analytics.
Review available application programming interfaces (APIs) for automated test scheduling and data harvesting. Continuous deployment pipelines benefit greatly when simulators accept JSON‑based configuration files rather than manually clicked menus. Open interfaces also let small research groups bolt on custom visualisation modules without expensive consultant overhead. In sum, openness unlocks creativity across the entire developer community.
Scalability from lab rig to proving ground
Prototype controllers may start on benchtop break‑out boards yet graduate to ruggedized units with fibre‑optic connectivity. Choose a simulator that expands channel counts, bus speeds, and sensor modalities without forklift upgrades. Network‑centric synchronisation across multiple chassis supports platoon or supply‑chain scale studies later in the programme. Licence models that count only active cores, not installed capacity, prevent budget shock.
Real‑time performance should remain consistent as modules grow. Ask to see documented measurements at 80 percent processor load. If frame drops spike once footprint grows, field exercise data will never align with lab predictions. Predictable scaling removes hidden schedule padding.
Long‑term upgrade and support roadmap
Military vehicle lifecycles extend decades, long after initial simulation purchase orders clear finance. A supplier committed to regular operating‑system patches and solver optimisations protects against obsolescence. Backwards compatibility for model files, signal definitions, and HIL wiring harnesses must remain a contractual requirement. Without that assurance, fielded vehicles could lose test‑bench parity midway through sustainment phases.
Check that support teams include engineers familiar with both mechanical integration and software refactoring. Annual training refreshes keep internal staff from losing touch with seldom‑used features. Joint road‑mapping sessions align platform upgrades with vehicle mid‑life overhaul schedules. Shared visibility helps budgeting teams plan refresh cycles instead of facing emergency funding gaps.
A rigorous selection process weighs fidelity, openness, scalability, and vendor commitment. Short‑term project wins should never sacrifice future adaptability. The simulator chosen today becomes the reference truth for every subsequent block upgrade. Careful scrutiny now saves costly detours once production ramps.
Key challenges in validating autonomous military vehicles using simulation
Autonomy elevates test complexity because software decisions shape where steel and human life go under fire. A military vehicle simulator provides safe space for experimentation yet still faces technical hurdles. Understanding those friction points lets you allocate risk‑reduction effort intelligently. Address them early to avoid certification surprises.
- Sensor model fidelity under obscurants: Dust, fog, and electronic countermeasures introduce decorrelated noise across lidar and radar returns. Poorly modelled artefacts can mask perception errors that later lead to route blockage.
- Edge‑case data volume: Safety cases may require billions of simulated kilometres to prove statistical robustness. Efficient batch scheduling and scenario variation generation become crucial to keep compute budgets reasonable.
- Cyber‑security validation: Autonomous stacks exchange over‑the‑air updates and platoon coordination packets, exposing attack surfaces. Simulated penetration tests must mirror realistic threat vectors without tipping off developer biases.
- Explainability of artificial intelligence (AI) decisions: Certification authorities need clear rationale for path choices and threat classification results. Logging every neural network intermediate layer is computationally heavy and raises intellectual property concerns.
- Seamless transition from simulation to live commissioning: Controller settings tuned in virtual space may drift when exposed to sensor temperature drift or cable impedance. Continuous verification pipelines linking HIL benches and instrumented test vehicles close that gap.
Each challenge marries software intricacy with military stakes. Robust governance, compute planning, and scenario design guard against hidden errors. Simulation remains the most practical lens for scrutinising autonomy, yet it must keep pace with shifting threat techniques. Clear‑eyed planning turns these hurdles into solvable tasks rather than showstoppers.
How OPAL‑RT supports simulation of autonomous and defense vehicles
OPAL‑RT delivers real‑time platforms that run fine‑grain physics and power electronics solvers at sub‑millisecond steps. Our FPGA‑accelerated cores handle hybrid propulsion inverters, active protection controllers, and mission computer networks without oversimplifying the math. Because the toolchain speaks Functional Mock‑up Interface, Python, and MATLAB / Simulink natively, you plug existing models into a single execution timeline. Hardware‑in‑the‑loop racks scale from a single control board to multi‑vehicle convoys thanks to deterministic time synchronisation. Cyber‑secure remote interfaces allow partner labs to share scenarios while keeping classified details partitioned.
Defence clients appreciate field‑proven reliability, backed by dedicated experts who answer complex timing or co‑simulation questions without delay. Licensing flexes with project phases, providing burst compute capacity during critical integration sprints, then shrinking when work shifts to analysis. We maintain long‑term firmware and driver support so your benches remain aligned with vehicles deep into sustainment. That ongoing commitment means your data stays repeatable, auditors stay satisfied, and crews deploy with confidence. When accuracy, openness, and schedule certainty matter most, OPAL‑RT stands ready as your simulation ally.
Common Questions
How can military vehicle simulation improve my system test coverage without increasing cost?
Simulation lets you push systems to operational limits without wear, crew risk, or range scheduling conflicts. Instead of deploying full hardware, you validate your control logic, communications protocols, and mission response through repeatable digital runs. This approach increases confidence in fault handling and complex interactions while lowering physical trial hours. With OPAL-RT, you gain real-time, closed-loop fidelity so every subsystem behaves as if deployed, without driving up development cost.
Why should I consider a military vehicle simulator for early-stage autonomy development?
Early autonomy prototypes often carry limited sensing and unstable software. Using a simulator removes the risks of physical crashes while allowing complete test orchestration. You can replicate GPS dropouts, signal interference, or unpredictable actor behaviour to refine your stack safely. OPAL-RT helps you build test coverage early so design pivots happen while they’re still cost-effective and data-rich.
What simulation features do I need to validate next-generation propulsion systems?
Validating hybrid-electric or all-electric military vehicles requires detailed modelling of power electronics, inverter dynamics, and energy storage. You’ll also need fault injection and thermal profiling tools to assess component resilience. Look for high-resolution solvers that support both control logic and hardware interfaces. OPAL-RT platforms use real-time, FPGA-based simulation to keep voltage transients and switching events visible, measurable, and tunable.
How does defense simulation support mission readiness and crew training?
Simulators allow you to replicate mission conditions—fog, jamming, sensor failure—so crews build confidence before deployment. Engineers can also rehearse emergency procedures and debug command handoffs without putting lives or equipment at risk. That readiness shortens response times and improves coordination under pressure. OPAL-RT supports integrated simulation environments where control teams, trainers, and safety analysts align on outcomes.
What makes a defense-grade simulator platform scalable and future-ready?
You’ll want support for open standards like Functional Mock-up Interface (FMI), high-frequency execution for new actuators, and compatibility with existing modelling tools. Modular expansion is critical as your platform scales from lab tests to full vehicle platoons. OPAL-RT offers precisely this through a hardware and software ecosystem that adapts to your growing architecture, reducing rework while boosting long-term adaptability.
Real-time solutions across every sector
Explore how OPAL-RT is transforming the world’s most advanced sectors.

Microgrid
11 / 30 / 2025
9 Effective approaches to managing energy in a microgrid
Engineers gain structured guidance on nine proven techniques for microgrid energy management that strengthen microgrid design, testing, and long term reliability.
Power Electronics
11 / 28 / 2025
Power electronics modeling and simulation explained for test engineers
Test engineers get practical guidance on power electronics simulation, converter modeling, and validation workflows that protect hardware and build confidence.
Simulation
11 / 26 / 2025
Real-time testing and simulation for battery energy storage systems
Engineers gain clear guidance on how real-time testing, battery simulation, and BMS testing strengthen safety and reliability in large energy storage systems.
EXata CPS has been specifically designed for real-time performance to allow studies of cyberattacks on power systems through the Communication Network layer of any size and connecting to any number of equipment for HIL and PHIL simulations. This is a discrete event simulation toolkit that considers all the inherent physics-based properties that will affect how the network (either wired or wireless) behaves.