
You deserve tools that keep pace with your engineering instincts. When time budgets shrink, you still need reliable data to steer key decisions. Fast, deterministic computation now reaches the desktop, giving you unprecedented control. Real time 3D techniques, once limited to expert labs, are now accessible to any diligent simulation engineer.
Gate‑level fidelity used to delay projects until late in the schedule. Today you can exercise processors, sensors, and actuators in the loop long before the first board spin. This shift rewards teams that adopt authentic timing models and responsive simulation hardware. Expect improved control, quicker validation, and smoother handoff from model to hardware when these principles guide your approach.
How real-time simulation gives embedded systems simulator teams more control
Real-time simulation turns abstract timing concepts into tangible constraints you can probe, pause, and tweak on demand. When you attach an embedded systems simulator to a plant model that executes in lockstep with actual clock cycles, each interrupt and memory access shows itself under a logical microscope. That clarity eliminates guesswork about race conditions, watchdog timers, and peripheral sequencing. You gain more control because the simulator stops being a side calculation and becomes a deterministically timed partner to your firmware.
Teams working on power electronics, autonomous flight surfaces, or battery management often juggle multiple interrupts that depend on nanosecond alignment. Traditional offline runs gloss over jitter, yet real-time simulation surfaces every clash so you can rewrite code or re‑order tasks while stakes remain low. With step‑by‑step observation, the embedded systems simulator records performance metrics that management can map straight to release criteria. The result is a tighter, calmer workflow that supports confident sign‑off without hidden timing debts.
What embedded systems simulation teaches you about real hardware confidence
Software behaves differently when it meets analog tolerances and hardware interrupts, so you deserve a rehearsal stage that mimics those realities. Embedded systems simulation gives that stage exact voltage swings, bus arbitration delays, and fault injections in milliseconds that equal physical gear. Running controllers in this environment builds trust because anomalies appear early, not after a costly lab session. Confidence rises for both engineers and project sponsors once data aligns across simulated and bench tests.
Timing fidelity translates to predictable commissioning
Commissioning day often exposes surprises from clock drift or interrupt starvation that went unnoticed in offline design tools. A cycle‑accurate embedded systems simulation exercises timers at the same tick rates as your microcontroller, making those surprises appear during coding, not in front of stakeholders. When you verify that task deadlines are met with margin, the resulting firmware behaves predictably once solder joints cool. Your colleagues see fewer late‑night patches, and your reputation for thoroughness grows.
Timing fidelity also guides procurement because you can justify less expensive oscillators or refine bus dividers based on observed slack. Spreadsheets alone rarely reveal such optimizations, yet simulation metrics quantify them in digestible numbers. The engineering manager gains budget headroom, while you gain proof that resource allocation remains safe. That joint win builds an atmosphere of mutual trust across mechanical, electrical, and software staff.
Fault injection without hardware casualties
Shorting a phase leg in a laboratory can burn components, yet virtual fault injection incurs no physical damage. Embedded systems simulation lets you provoke overcurrent, undervoltage, and sensor dropout while logging firmware behaviour at microsecond resolution. You inspect how proportional–integral–derivative gains react or whether emergency shutdown pins assert within required latency. Such fearless experimentation teaches you exactly how sturdy the design is before a single fuse blows.
The test engineers skip repetitive board rework, and procurement avoids urgent part orders. Meanwhile, software specialists examine crash traces under calm conditions rather than during frantic repair. This culture of low‑risk fault discovery shortens mean time to insight. Confidence grows because everyone has seen worst‑case scenarios and survived.
Sensor emulation clarifies calibration strategy
Hall sensors, gyros, and thermistors bring conversion noise and frequency response limits that spreadsheets flatten. Through embedded systems simulation you replicate those limits, feed them into control loops, and confirm stability margins with realistic noise floors. Calibration algorithms can then be tuned for expected drift instead of ideal values. Operators spend less time tweaking potentiometers on the lab bench.
Downstream, production technicians follow documented procedures that already account for variance uncovered in simulation. Quality engineering sees tighter process capability indices, which pleases compliance auditors. The facility ships boards more consistently because the calibration strategy was hammered out before tooling was ordered. Again, confidence stems from early, data‑driven insight.
Cross‑disciplinary alignment strengthens sign‑off criteria
Mechanical, electrical, and software groups often evaluate performance with different units and dashboards. An integrated embedded systems simulation hosts shared signals, allowing each discipline to view familiar data while referencing a single truth source. For instance, a thermal engineer monitors junction temperature, while a firmware lead watches pulse‑width modulation duty cycle, both tied to the same transient. Stakeholders discuss findings using aligned timestamps, avoiding disputes over log synchronisation.
This common reference shortens design reviews because fewer slides are spent reconciling data sets. Direct comparison encourages earlier consensus, which in turn accelerates release gates. Managers see schedule certainty improve, and engineers feel appreciated for rigorous collaboration. Such harmony represents tangible confidence that the hardware will perform as promised.
Lessons drawn from embedded systems simulation resonate across timing, faults, calibration, and collaboration. Each discipline receives evidence that their assumptions match physical limits. Stakeholders relax because field surprises become unlikely. Confidence in real hardware grows naturally when every unknown was examined under controlled digital conditions.
How real-time 3D simulation accelerates validation and prototyping
Physical prototypes cost time, tooling, and floor space, so teams appreciate models that mimic spatial behaviour with high fidelity. Real time 3D simulation renders kinematics, thermal spread, and electromagnetic fields in interactive form while maintaining deterministic timing. This capability sits at the crossroads of graphics engines and hard deadlines, making it a potent driver for swift design cycles. When controllers talk to realistic 3D plants at speed, validation sprints multiply without extra material cost.
- Early collision detection: Engineers check actuator clearances and linkage limits through 3D geometries before metal gets cut. Accidents that once surfaced during fixture assembly are caught in hours, sparing budgets and schedules.
- Real‑time photorealistic optics: Optical sensors such as lidar, camera arrays, and infrared detectors can be stressed under simulated sunlight, fog, or tunnel glare. Control algorithms adapt to extreme scenes, building resilience long before track trials.
- Physics‑based thermal flow: The 3D solver shows heat pockets around power modules while the embedded controller modulates fan speed. This interplay validates cooling strategies and prevents late heat‑sink redesigns.
- Integrated electromagnetic field visualisation: Motor designers inspect flux distribution and torque ripple while firmware manipulates pulse patterns, correlating current probes to visible vector fields. Such visual feedback accelerates motor control tuning sessions.
- Human‑machine interface evaluation: Operators interact with virtual dashboards projected onto 3D cockpits while latency remains under strict limits. Usability feedback returns sooner, tightening ergonomic specs.
- Cloud‑scaled session replay: Recorded scenarios replay in real time for remote stakeholders, keeping synchronization across global offices. Decisions are made collaboratively with zero shipping delays for hardware.
Each acceleration point compounds, trimming weeks from typical validation calendars. Real time 3D simulation holds value because it blends spatial realism with hard deadlines that embedded firmware demands. Teams observe missteps visually, correct them numerically, and retest instantly. The prototyping loop contracts to a span that once fit only layout revisions.
Simulation in embedded system workflows delivers each of those pillars through reproducible timing and cloud reach.
Why embedded systems simulator improves test accuracy and repeatability
Accurate seeing is accurate weighing, and the embedded systems simulator keeps every signal aligned with physical sampling rates. When your analog‑to‑digital converter reads a simulated current at precisely the same microsecond as it would on silicon, correlation errors vanish. Repeatability follows because each run inherits identical initial conditions, component tolerances, and fault seeds. Test plans stop fighting temperature drift or bench variability, focusing instead on design insight.
Statisticians on certification teams welcome this stability because confidence intervals shrink. Regression suites run overnight with hundreds of seeds, producing histograms that speak the language of quality audits. A hardware‑in‑the‑loop bench rarely matches that throughput, so simulation occupies the high‑volume verification domain. The lab then concentrates on final acceptance, assured that deterministic runs have ironed out corner cases.
How simulation in embedded system supports scalable development cycles
Growth places unique stress on tooling when a single controller variant multiplies into an entire product family. Simulation in embedded system contexts offers elasticity, letting you spawn or retire virtual hardware as milestones progress. This elasticity keeps test coverage proportional to ambition instead of headcount. You can pace expansion without sacrificing thoroughness.
Modular models align with variant management
A scalable cycle begins with separating common elements from variant‑specific modules. Simulation repositories let you swap inverter ratings or sensor packs without touching the core scheduler. Configuration management then tracks only the delta, reducing merge conflicts in version control. New variants integrate smoothly because the baseline has already proven stable.
Manufacturing can commit to common printed circuit board footprints, confident that simulation has vetted shared pathways. Component kitting simplifies, which helps supply chain planners. The overall bill of materials stays lean across models. That discipline speeds market response when a client asks for custom wattage or payload.
Parallel execution shortens queues
When multiple teams need the same embedded plant model, cloud‑based real time hosts spin up parallel nodes. Each node clocks at hardware rates, so every group retains timing fidelity. Waiting lines vanish, and frustration subsides. Throughput rises without additional capital outlay.
Management can trace utilization metrics to justify future capacity increases rather than guessing. Cost centres align with project budgets, supporting transparent accounting. Engineers see immediate feedback on merge requests instead of scheduling scarce bench time. Overall rhythm improves across development increments.
Continuous integration meets hardware-in-the-loop
Code repositories already trigger unit tests; hardware in the loop events can follow the same webhook. Simulation in embedded system frameworks accepts compiled firmware images, boots them in milliseconds, and reports pass or fail. The commit log now includes deterministic power‑on cycles, giving developers instant assurance. Faults detected within minutes cost less to remedy than those found during design freeze.
Release managers appreciate evidence instead of assumptions during gate reviews. Auditable logs pair with simulation snapshots, satisfying quality standards. The factory starts tooling with greater certainty. Scalable automation links every department to shared progress.
Resource abstraction eases cross‑site collaboration
Geographically separated teams no longer ship prototypes; they share simulation identifiers. A unique run ID recreates processor registers, plant states, and stimulation vectors exactly. Discussion focuses on design behaviour rather than inconsistent bench wiring. Software, mechanical, and power engineers reach conclusions faster.
This abstraction method also supports phased rollouts where early adopters test hotfixes while others remain on stable builds. Lessons learned propagate quickly because the scenario is perfectly reproducible. Scalability thus extends beyond compute cycles into knowledge. The pace of improvement accelerates across the organisation.
Scalable cycles rely on modularity, concurrency, automation, and abstraction. Simulation in embedded system workflows delivers each of those pillars through reproducible timing and cloud reach. Teams grow without overloading benches or risking coverage gaps. The project portfolio rises in complexity while schedules remain predictable.
When embedded systems simulation lets you cut integration risk
Integration becomes stressful when firmware meets unfamiliar sensors, communication buses, or safety logic at once. Embedded systems simulation breaks that convergence into rehearsed exchanges, isolating failure modes before physical harnesses arrive. You attach real controllers to virtual peripherals or vice versa, confirming handshake protocols and timeout policies. The first full‑stack power‑up then feels routine rather than suspenseful.
Suppliers appreciate early feedback because it surfaces ambiguities in the specification while change orders remain cheap. Your test lab avoids last‑minute wiring changes, and the commissioning crew arrives to a system that already booted numerous times in digital space. Warranty budgets shrink when early detection prevents latent faults. Risk moves from possibility to quantified metric that leadership can manage.
How real-time simulation in embedded system fits your team’s workflow
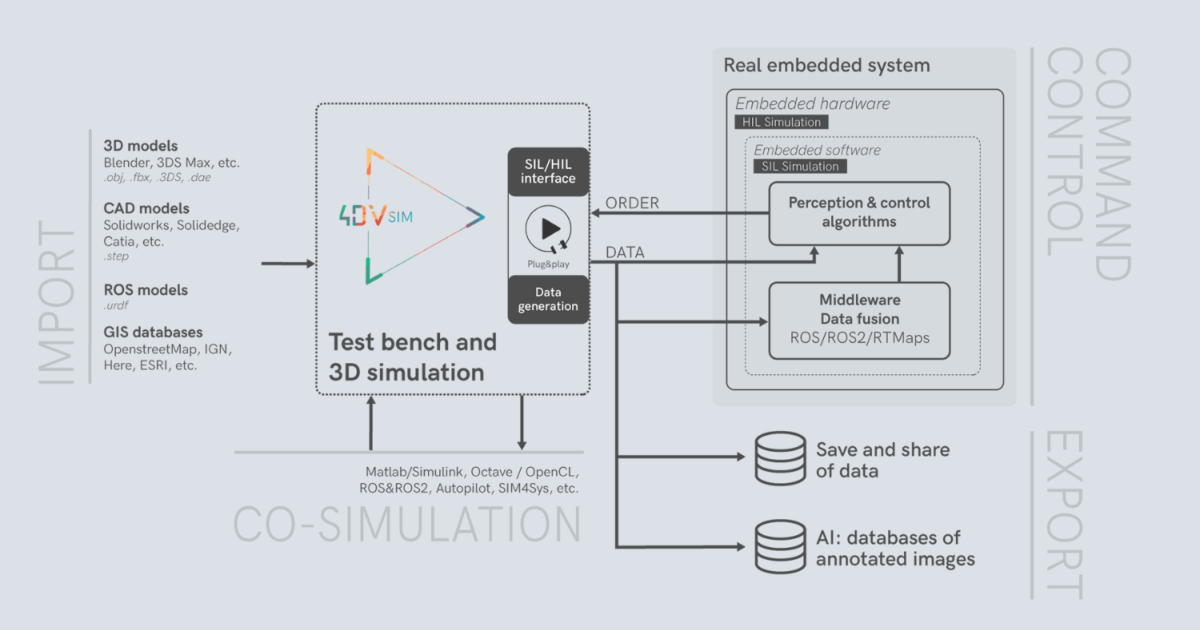
Toolchains vary across enterprises, yet every group shares the need for dependable timing. Real-time simulation in embedded system contexts respects that diversity, mapping to familiar interfaces without imposing rigid patterns. You plug in at the level of Simulink, Modelica, Python, or C, and still hit microsecond deadlines. The result is a workflow alignment that reduces frustration and training time.
- Seamless code import: Bring compiled binaries from your existing continuous integration server, and the simulator boots them as if they ran on physical silicon. Build scripts remain unchanged, which smooths adoption.
- Open communication buses: Connect CAN, LIN, Ethernet, or SpaceWire hardware to virtual plants through standardized adapters. Your stack sniffs bus traffic in real time, closing monitoring gaps.
- Co‑simulation bridges: Interface with field‑proven electromagnetic, thermal, or mechanical solvers through functional mock‑up units (FMUs). Engineered couplings maintain causal order, keeping every solver honest about latency.
- Scripting freedom: Python hooks let testers compose fault campaigns or parameter sweeps with a handful of lines. That agility encourages exploratory trials that squeeze hidden insights from the model.
- Hardware pass‑through: Attach scope probes, drives, or load banks to analogue and digital I/O on the simulator chassis. Your lab remains hands‑on while retaining deterministic control.
- Metrics at a glance: Built‑in dashboards stream frame‑accurate plots to any browser so managers monitor test status without asking for screenshots. Transparency nurtures trust across the organisation.
An aligned workflow removes barriers between intention and verification. Real-time simulation in embedded system setups adapts to your preferred tools instead of forcing migration. Engineers stay productive while embracing higher‑fidelity tests. That harmony keeps projects on track and motivation high.
You gain more control because the simulator stops being a side calculation and becomes a deterministically timed partner to your firmware.
How OPAL‑RT can help embedded systems teams move from simulation to deployment
OPAL‑RT stands beside engineering teams who demand deterministic timing and hardware transparency. The company’s modular simulators combine field‑programmable gate array (FPGA) logic with multicore CPUs, giving your models sub‑microsecond step size without surrendering flexibility. RT‑LAB software ties those engines to MATLAB/Simulink, Python scripts, and functional mock‑up units, so your existing assets plug straight in. Open application programming interfaces let you automate scenarios, synthesize faults, and gather high‑density logs that satisfy rigorous certification audits. From single‑board prototypes to grid‑connected power electronics, the same platform scales so you invest once yet continue using the tool as projects grow.
When the time arrives to move firmware onto production hardware, OPAL‑RT hardware‑in‑the‑loop fixtures keep the virtual plant connected so regression coverage never slips. Support engineers around the globe answer timing, calibration, and interoperability questions in hours, not weeks. You receive both instruments and insight, allowing your team to present confident data to leadership. Choose OPAL‑RT for precision you can trust, depth you can rely on, and partnership that stands steady throughout deployment.
Common Questions
How can I validate my embedded controller without risking physical hardware damage?
You can validate embedded controllers early by using an embedded systems simulator to replicate plant models, sensors, and hardware I/O under controlled digital conditions. This allows you to test real firmware against simulated inputs, including edge cases and fault scenarios, without damaging physical boards. Simulation helps surface timing bugs, calibration errors, and integration mismatches before any electrical connections are made. With OPAL-RT, you access real-time fidelity and hardware pass-through options that support accurate testing under realistic conditions. This lowers both hardware replacement costs and overall development risk.
What’s the difference between offline simulation and real-time 3D simulation for embedded systems?
Offline simulation calculates outputs frame-by-frame without strict timing, while real-time 3D simulation processes physics and control logic in sync with actual hardware cycle timing. The result is a more reliable, test-ready platform that accounts for communication jitter, peripheral delays, and real-time feedback. When you’re validating embedded systems, real-time simulation reveals faults that offline models miss, especially during controller transitions or interrupt-driven tasks. OPAL-RT systems allow teams to connect firmware to real-time 3D plant models with visual and temporal precision, reducing late-stage surprises.
Why does test repeatability matter so much in embedded systems simulation?
Repeatable simulation means each run produces the same results under the same starting conditions, which is critical when debugging firmware and verifying control responses. Without consistent timing, it becomes hard to isolate issues or meet certification requirements. Embedded systems simulation offers deterministic behaviour, so regression tests and validation protocols stay reliable across versions. OPAL-RT provides microsecond-level repeatability and session logging to help you replicate exact conditions and track firmware improvements over time.
How does embedded systems simulation support concurrent development across teams?
Simulation lets mechanical, electrical, and software teams work in parallel without needing shared lab space or physical prototypes. Teams can connect to the same digital models from different locations, test independently, and share simulation IDs that preserve signal and timing integrity. This supports rapid feedback and reduces misalignment between disciplines. OPAL-RT platforms are built for collaborative use, with open APIs, session replay, and toolchain compatibility that make simultaneous development smooth and traceable.
Can simulation in embedded systems help reduce overall project costs?
Yes, simulation reduces costs across prototyping, debugging, and integration by minimizing hardware rework, lab time, and emergency redesigns. Teams catch issues earlier, complete more tests virtually, and only build physical units once the firmware is validated. Fewer engineering hours are spent tracking intermittent faults or staging test rigs. OPAL-RT helps teams validate early and scale efficiently, reducing both direct expenses and schedule overruns.
Real-time solutions across every sector
Explore how OPAL-RT is transforming the world’s most advanced sectors.

Simulation
03 / 11 / 2026
9 Common hardware in the loop testing pitfalls in embedded and control validation
Nine common hardware-in-the-loop testing pitfalls in embedded and control validation, with practical fixes for timing, model fidelity, solver stability, I/O integrity, protocol behaviour, automation repeatability, and configuration traceability.
Power Electronics
03 / 09 / 2026
FPGA vs CPU for real time power electronics simulation
You’ll learn how to choose CPU, FPGA, or a split approach for real-time power electronics HIL simulation using time step targets, latency and jitter needs, switching model fidelity, partitioning, and workflow constraints.

Simulation
03 / 04 / 2026
When to add FPGA acceleration to an existing real time simulator
Engineers can use timing symptoms, workload fit, and migration steps to decide when FPGA acceleration will resolve HIL deadline, latency, and jitter limits in an existing real-time simulator.
EXata CPS has been specifically designed for real-time performance to allow studies of cyberattacks on power systems through the Communication Network layer of any size and connecting to any number of equipment for HIL and PHIL simulations. This is a discrete event simulation toolkit that considers all the inherent physics-based properties that will affect how the network (either wired or wireless) behaves.