The engineer’s guide to modular and multi-domain simulation platforms
Simulation
08 / 14 / 2025

You deserve simulation tools that keep pace with your imagination. Every prototype deadline, every safety review, and every systems handshake depends on reliable results you can trust. When models slip behind hardware updates, delays ripple into missed milestones. Real‑time, modular simulation keeps that domino train from starting.
From electric aircraft to microgrids, design stakes have never felt higher. Regulators ask for deeper proof, finance teams push for leaner budgets, and your team still only has twenty‑four hours each day. Adopting modular and multi-domain simulation shortens test loops without cutting corners. Solid technical choices today set the pace for every launch tomorrow.
Why modular simulation matters for product development cycles
Instead of rewriting an entire model when a subsystem changes, you swap a module and keep running overnight. That flexibility keeps simulation product development aligned with agile sprint cadences and hardware refreshes. Teams compare alternate technologies quickly, because each component stands on its own digital twin.
Modular simulation also protects investment as requirements mature. When functional safety adds new fault cases, you attach fault‑injection blocks instead of re‑authoring the entire test bench. The same framework moves from desktop to Hardware‑in‑the‑Loop (HIL) rigs without translation. That continuity trims hand‑offs, documentation overhead, and the frustration of mismatched models.
Modular simulation scales with the questions you ask, not with the hardware vendor’s menu.
Key capabilities engineers should expect from simulation platforms
A simulation platform must feel like an extension of your lab bench. It should integrate tools you already trust, speak common formats, and run fast enough to matter. When vendors lock you into proprietary pathways, creativity narrows. The most helpful platforms stay open, predictable, and focused on performance.
- High‑speed solver performance: Milliseconds count when testing closed‑loop controllers. Your platform should maintain sub‑100‑microsecond latency for stable HIL tests while scaling complex physics.
- Open modelling standards: Support for the Functional Mock‑up Interface (FMI) lets you import vendor‑neutral Functional Mock‑up Units (FMUs) without translators. Native MATLAB/Simulink co‑simulation avoids painful export cycles.
- Scalable hardware architecture: You start on a laptop, migrate to a rackmount target, then plug in extra input‑output cards as channel counts grow. Consistent drivers and firmware prevent refactoring.
- Rich fault‑injection toolkit: Engineers need to test rare faults like stuck contactors or bus transients without rewiring cables. Software‑controlled fault scenarios reduce risk and shorten certification reports.
- Cross‑domain synchronization: Electrical, mechanical, thermal, and network models must share a clock so energy flows stay faithful. Deterministic scheduling keeps inter‑domain events aligned within microseconds.
- Automated verification hooks: Application programming interfaces (APIs) for Python or LabVIEW let you script thousands of regressions while you sleep. Continuous integration pipelines catch drift before it ships.
Expecting these capabilities up front avoids technical debt later. Once a platform checks these boxes, your team spends time innovating rather than debugging connectors. Stakeholders see faster validation cycles and fewer late surprises. That confidence spreads across every part of the project.
Understanding multi-domain simulation for complex system testing
Complex products rarely stay confined to one discipline. A modern electric vehicle blends power electronics, mechanical drivetrains, battery chemistry, networking, and ambient forces. Testing each silo independently misses critical interactions like torque ripple feeding back into motor controllers. Multi-domain simulation brings these interactions into one coherent loop.
Bringing all these domains into a synchronized loop turns guesswork into measurable data.
Electrical and mechanical co‑simulation
Torque and speed feedback travel from mechanical shafts into inverter control decisions within microseconds. Multi-domain simulation aligns rigid‑body dynamics with circuit solvers, letting you observe resonance issues before hardware breakage. Coupled models also highlight bearing loads that surge under certain modulation strategies. These insights guide material choices early, saving costly retooling.
Setting the electrical time step small enough for switching while keeping mechanical horizons long would normally balloon the runtime. Partitioning techniques inside a multi-domain simulation schedule each subsystem on an appropriate solver then reconcile states at a shared boundary. You tune co‑simulation tolerances instead of rewriting equations. The result is accurate trajectories without overnight waits.
Power electronics with control software
Gate signals leaving an FPGA meet analog parasitics inside high‑voltage stacks. Multi-domain simulation embeds these parasitics right beside your digital control code, eliminating hidden oscillations. Developers iterate pulse‑width modulation schemes virtually, pushing efficiency beyond static datasheet limits. The same model drives HIL rigs when firmware reaches the verification stage.
True closed‑loop timing reveals interrupt latencies that paper calculations overlook. You quickly identify scheduler conflicts triggered under corner cases. Firmware teams adjust priorities while still at the workstation. That proactive workflow removes lab downtime.
Communication networks and cybersecurity layers
A misplaced Controller Area Network (CAN) arbitration can drop crucial torque vectors. Multi-domain simulation integrates network traffic generators so that electrical loads, sensors, and gateways exchange packets under realistic bus contention. Test benches replay denial‑of‑service attacks to confirm intrusion responses remain deterministic. These exercises inform firewall rules and watchdog strategies.
Linking cyber models with physical plants exposes attack chains that pivot across layers. An out‑of‑range sensor value can propagate through software into mechanical strain, illustrating how security flaws become safety issues. Seeing this chain inside a single simulation persuades stakeholders to fund mitigations early. The cost of adding encryption later drops drastically.
Ambient and thermal effects on system behaviour
Temperature swings bend timing crystals, change semiconductor switching losses, and shift lubricant viscosity. Multi-domain simulation overlays thermal fields onto electrical and mechanical meshes, revealing slow drifts that sabotage calibration. Battery packs evaluated at only one temperature appear fine until a winter test bench fails. Virtual climate sweeps catch these surprises.
You modify fan curves, coolant flow, or enclosure design digitally instead of cutting metal. Iterating across fifty temperature set‑points within hours improves design confidence for certification. Thermal‑aware models also support lifetime predictions, flagging hotspots that shorten component service intervals. Maintenance plans rely on measured data.
Bringing all these domains into a synchronized loop turns guesswork into measurable data. Engineers see cause‑and‑effect chains that commit earlier to solutions. Multi-domain simulation therefore, shrinks the delta between simulation and field performance. That alignment cuts cost and risk for every stakeholder.
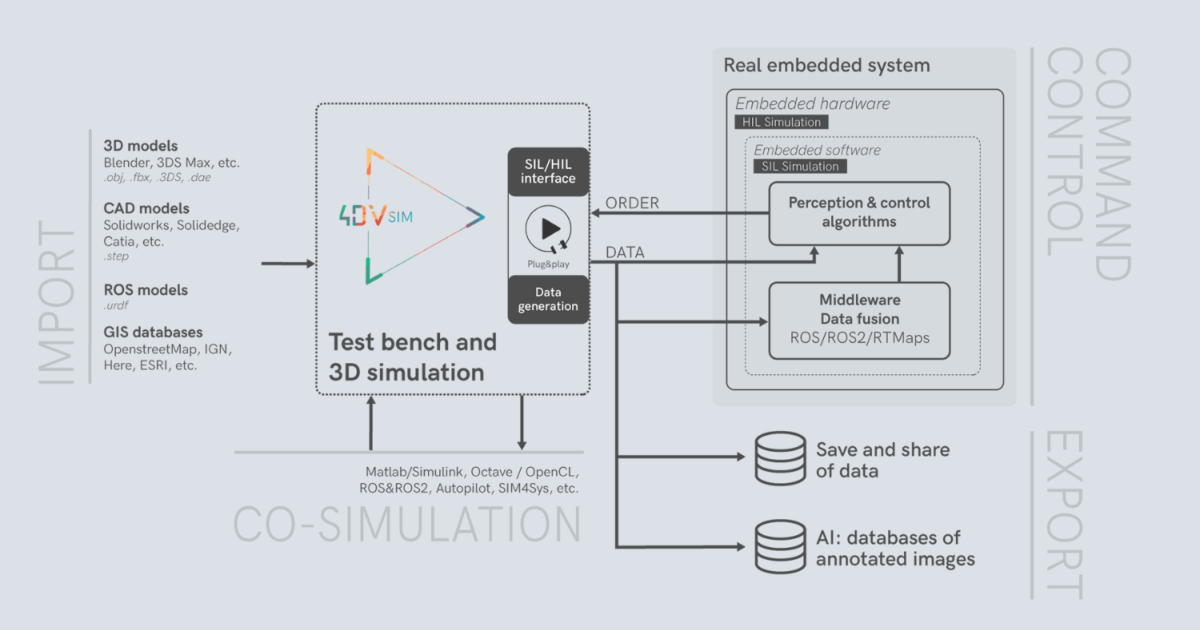
Embedded systems simulation explained for engineers
Embedded systems simulation creates a digital stand‑in for microcontrollers, peripherals, and the code that binds them. Running this stand‑in at real‑time speed means sensor signals, interrupt routines, and bus traffic interact exactly as they would on silicon. The technique bridges the gap between pure software tests and full hardware rigs, saving schedule time. Engineers repeatedly flash firmware images inside the virtual target before committing to boards.
Two main approaches dominate: instruction-set simulation (ISS) and mixed Hardware-in-the-Loop co-simulation. ISS focuses on the functional correctness of code, while hardware‑in‑the‑loop couples that code to electrical loads over physical interfaces. Choosing the right level depends on verification goals, budget, and safety needs. The table below highlights their contrasts.
| Aspect | Instruction‑set simulation | Hardware‑in‑the‑loop embedded simulation |
| Execution speed | Faster than real‑time for pure code analysis | Real‑time or faster, depending on target hardware |
| Fidelity | Functional accuracy only, limited timing detail | Cycle‑accurate I/O timing, includes analog effects |
| Hardware cost | Laptop or workstation only | Requires real‑time target, I/O cards, and harnesses |
| Typical stage | Early unit testing and algorithm tuning | Validation, certification, safety testing |
How simulation platforms streamline testing across industries

Simulation platforms slot neatly into different sector workflows while sharing a core execution engine. Energy grids seek millisecond‑level fault recreation, automotive programs chase autonomous safety targets, and aerospace programmes manage redundant flight controls. A unified toolchain keeps domain‑specific requirements satisfied without parallel development paths. That cohesion saves budget on tools, training, and maintenance.
Energy and power systems
Utilities run HIL studies to test protection relays against wide‑area disturbance scenarios. Simulation platforms replicate sub‑cycle dynamics of microgrids, capturing inverter droop responses under sudden load changes. Engineers evaluate black‑start sequences safely without risking equipment. Time‑aligned playback of field synchrophasor data verifies model accuracy.
Regulators require proof that renewable integration will not destabilize legacy infrastructure. Multi-domain simulation offers frequency sweeps and fault‑level metrics before site commissioning. The same models feed operator training modules, improving response times during actual faults. Costly grid events decrease over time.
Automotive and mobility
Electric drivetrain design thrives on quick iteration cycles. Simulation platforms marry battery electrochemistry with motor control firmware, so range and thermal budgets stay balanced. Regenerative braking logic tunes itself against traffic profiles in minutes rather than days. With Vehicle‑in‑the‑Loop setups, physical chassis dynamometers receive precise torque commands from the simulator.
Advanced driver‑assistance systems (ADAS) add radar, lidar, and vision channels to the mix. Co‑simulation injects sensor noise and latency, exposing corner cases that static datasets overlook. Developers refine fusion algorithms without closing test tracks. That approach lowers validation mileage requirements.
Aerospace and avionics
Flight control computers must respond within strict worst‑case bounds across altitude, pressure, and fault situations. Hardware‑in‑the‑loop rigs emulate sensor suites, actuators, and redundant buses, letting teams verify fault‑tolerance logic. Loop closure at microsecond resolution uncovers flutter phenomena early. Certification authorities accept these digital tests as part of the safety dossier.
Engineers also use real‑time rigs for pilot‑in‑the‑loop training. High‑fidelity motion platforms connect to the same simulation engine, ensuring consistent physics. Synchronised visuals and forces improve skill transfer to the cockpit. Cost per flight hour drops significantly.
Academic and research labs
Universities benefit from flexible licensing that supports both teaching and grant‑funded research. Students experiment with motor control or grid stability on desktop PCs before reserving lab hardware. Researchers scale those models onto cluster targets when higher fidelity is needed. Shared code repositories speed peer review.
Open scripting interfaces encourage novel algorithm development. New power converter topologies, artificial intelligence controllers, or optimisation routines integrate without barriers. Findings transfer directly to industry partners already using the same platform. Knowledge gaps shrink between academia and practice.
Across all these sectors, the core value remains reduced risk and shorter lead times. A single simulation platform cuts redundant investments and smooths talent mobility. Engineers gain a common language for verification. Management gains predictable schedules.
What to look for when evaluating modular simulation tools
Procurement checklists usually begin with price and channel count but miss less visible criteria. A true modular simulation solution should publish an open application programming interface, support multiple solver kernels, and provide clear upgrade paths. Licensing terms need to scale seats up and down without hidden fees. Transparent documentation and local support channels close the loop.
Hardware must accept different I/O modules without firmware recompilation, saving hours during setup. Look for FPGA reconfiguration times under five minutes to encourage experimentation. Software maintenance cycles should follow predictable versioning with long‑term support branches. Finally, vendor training resources should focus on engineering outcomes, not marketing speeches.
Common challenges simulation engineers solve with multi-domain tools
Even seasoned teams encounter recurring roadblocks during verification. Multi-domain simulation addresses many of these frustrations head‑on. Recognising them early prevents schedule erosion. Selecting tools that already address these issues avoids expensive workarounds.
- Clock drift between subsystems: As models grow, each solver can slip a few microseconds per cycle. A unified scheduler keeps feedback loops stable.
- Prototype hardware scarcity: Development boards are often limited in quantity, forcing teams to wait their turn. Real‑time digital twins let everyone test firmware simultaneously.
- Regression fatigue: Manually re‑running hundreds of cases leads to missed edge conditions. Scripted test benches inside the simulator cover the full matrix every night.
- Sensor noise reproduction: Gaussian noise generators inside the model replicate imperfect readings more accurately than simple constants. Algorithms train against realistic inputs.
- Version control for models: Binary model files resist diff tracking, confusing collaboration. Modular libraries stored as readable code fix this issue.
- Licensing bottlenecks: Tool activations tied to single machines slow remote work. Floating licences distributed across the lab maintain productivity.
Each challenge above steals hours in aggregate. Multi-domain simulation tools reclaim that time through automation and accuracy. Freed capacity shifts energy toward innovation. Stakeholders notice the momentum.
How OPAL‑RT helps accelerate simulation product development and testing
OPAL‑RT delivers simulation platforms that span desktop, rackmount, and cloud targets without rewriting a single model. Our FPGA‑accelerated solvers keep sub‑microsecond alignment between electric, mechanical, and network domains. You integrate Functional Mock‑up Units, MATLAB/Simulink blocks, and Python code through an open interface, protecting earlier investments. Field‑swappable I/O cards handle voltages from millivolts to kilovolts, so one chassis covers early research and certification tests. We back this hardware with dedicated engineering support that speaks your application language, not sales jargon.
Teams report schedule reductions of up to forty percent after migrating to our simulation product development workflow. Built‑in automation ties regression suites into continuous integration servers, catching issues overnight. Global service hubs keep firmware, documentation, and training current, sustaining productivity long after purchase. Choose OPAL‑RT when accuracy, openness, and integrity matter.
Common Questions
How does modular simulation help reduce engineering project delays?
Modular simulation helps you adjust and iterate designs without starting over when subsystem changes occur. This shortens feedback loops and keeps your simulation product development aligned with agile timelines. You can isolate, test, and replace system components while preserving integration with the rest of the model. Faster iterations reduce bottlenecks in prototyping and regression testing. OPAL‑RT platforms support this flexibility with real‑time fidelity and scalable architecture.
What’s the difference between multi domain simulation and co‑simulation?
Multi domain simulation unifies different physical and logical models—like electrical, mechanical, and thermal—under one synchronized timebase. Co‑simulation can refer to separately executed models that share data but don’t always guarantee time alignment. The distinction matters when accuracy and timing must reflect real‑world cause‑and‑effect relationships. With OPAL‑RT, you can achieve tightly integrated, real‑time co‑simulation that reflects multi domain interactions accurately and consistently.
Why should I use embedded systems simulation before deploying firmware?
Embedded systems simulation lets you validate firmware against expected sensor inputs and external events without needing full hardware availability. You test edge cases, interrupt handling, and logic flows earlier in the cycle, reducing bugs and avoiding expensive delays in hardware testing labs. This approach minimizes the risk of firmware‑hardware mismatches during deployment. OPAL‑RT lets you simulate both software execution and I/O behavior using real‑time digital twins.
How do simulation platforms improve testing across industries?
Simulation platforms offer a common infrastructure that adapts to sector‑specific requirements—whether you’re testing energy relays, electric motors, or flight controls. You get shared tooling across projects with different technical goals, which improves team collaboration and cuts training and licensing costs. Consistency in toolchains also reduces integration friction when transitioning from R&D to validation. OPAL‑RT systems support this continuity across aerospace, automotive, energy, and academia.
What should I check before selecting a simulation platform for my lab?
Start by verifying real‑time performance, open model compatibility, and hardware scalability. Evaluate how well the platform handles your specific use case—such as HIL, Software‑in‑the‑Loop, or multi-domain requirements. Also assess fault injection, scripting interfaces, and long‑term support. OPAL‑RT delivers simulation platforms that meet these criteria with a focus on engineering precision, open interfaces, and practical tools that grow with your testing needs.
Real-time solutions across every sector
Explore how OPAL-RT is transforming the world’s most advanced sectors.
Automotive
01 / 29 / 2026
9 Motor drive fault injection scenarios for controller validation
Motor drive fault injection scenarios for HIL controller validation, with clear pass criteria and a practical order for running inverter and sensor faults.

Simulation, Microgrid
01 / 27 / 2026
Why simulation is vital for renewable microgrid design and cybersecurity
Practical guidance on renewable microgrid simulation and energy simulation cybersecurity, focused on controls, protection, transients, and cyber scenarios.

Power Systems
01 / 27 / 2026
Building a regression testing pipeline for HIL in electrification teams
Practical guidance on HIL regression testing and test automation for electrification teams, from pipeline setup and test design to CI integration, data handling, and failure modes.
EXata CPS has been specifically designed for real-time performance to allow studies of cyberattacks on power systems through the Communication Network layer of any size and connecting to any number of equipment for HIL and PHIL simulations. This is a discrete event simulation toolkit that considers all the inherent physics-based properties that will affect how the network (either wired or wireless) behaves.