Autonomous off-road vehicles
TRN-OP1172-TUTOR
Autonomous off-road vehicles
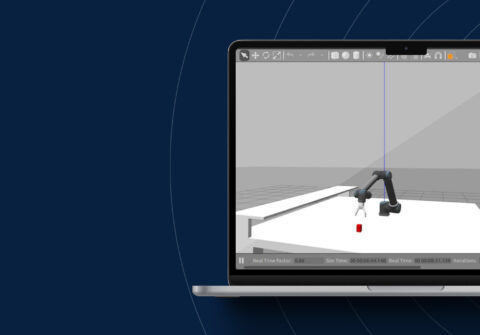
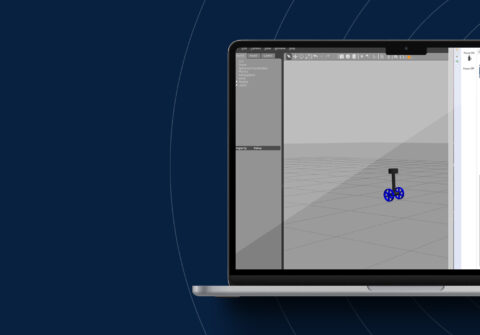
This course is intended to teach the autonomous applications of off-road vehicles. Three architectures are proposed: (i) a differential drive robot carrying a UR10e to move in a warehouse, (ii) an Ackermann-based steering tractor with a 3 dof (degrees-of-freedom) planar mower arm to drive on a highway and cut the grass, and (iii) an articulated-based steering tractor with a loader arm, and bucket to load/unload material in a construction/mill court.

Duration
Online: 4 days
Type
Robotics courses
Prerequisites
TRN-OP1170-TUTOR: Serial robotics manipulators, TRN-OP1171-TUTOR: Wheeled mobile robot
Content
Build your expertise
Our Electrical & Robotics Systems courses leverage OPAL-RT’s courseware as virtual laboratories, providing hands-on experience that enhances the understanding of each topic. Explore the content of this course and gain insight into what you’ll achieve.
01
Differential-drive robot platform and UR10e
02
Ackermann-based steering tractor and mower arm
03
Articulated-based steering wheeled loader
04
Sensors: LIDAR, IMU, GPS
Formats
Choose between our available formats
Online remote
Online remote training sessions are conducted via videoconference, allowing great flexibility for attendees


Enroll in a course today
We support students and professionals seeking to deepen their knowledge in Electrical and Robotics Engineering. We’ll pair you with a qualified instructor who will help elevate your skills to the next level.
FAQ
Find the answers to your questions
How do I register for a course?
To enroll in a course, fill out the course request form and specify the course you would like to take.
How much does this course cost?
Course pricing varies. Please fill out the course request form for more information.
Courses
Discover other courses
From foundational theory to hands-on lab work, our Electrical & Robotics Engineering courses help you apply your knowledge through interactive virtual test benches.