Mastering automotive simulation tools for autonomous vehicle development
Automotive
08 / 05 / 2025
Your next autonomous prototype deserves to leave the garage with absolute confidence. That peace of mind comes from exhaustive simulation long before wheels touch asphalt. Hardware‑in‑the‑loop (HIL) benches and physics‑rich virtual tracks surface edge cases earlier, slash integration time, and cut costly recalls. Yet achieving reliable, repeatable results demands tooling that keeps pace with soaring perception loads and strict safety standards.
Recent breakthroughs in graphic processing, field‑programmable gate arrays, and machine learning have reshaped vehicle development timelines. Teams can now evaluate sensors, decision logic, and actuators in a unified digital setting running faster than real time. Those gains only matter when the platform, hardware, and workflows line up with daily engineering constraints. This guide shares practical insights on selecting, integrating, and scaling automotive simulation tools so you deliver safer code sooner.
Why HIL testing in automotive systems saves time and improves validation
Hardware‑in‑the‑loop testing in automotive projects replaces expensive road prototypes with a controlled bench that links electronic control units to a real‑time plant model. Instead of waiting weeks for a prototype harness to be built, you upload control firmware to the bench and drive virtual kilometres in minutes. Because the plant model runs deterministically beside the controller, faults are reproduced on demand and logged without ambiguous trace data. Early failures caught through HIL testing in automotive workflows typically cut verification cycles by 30 percent, giving you more calendar room for calibration and certification. Shorter cycles mean fewer change orders, smaller prototype fleets, and stronger statistical coverage before a single test track booking.
Time savings alone do not justify HIL investment unless validation depth improves as well. A bench allows fault injection far beyond what regulations permit on public roads, letting your team evaluate power‑off restarts, voltage dips, or spoofed sensor frames in complete safety. Linking the same plant model to your software‑in‑the‑loop rig ensures that inputs seen in early algorithm sprints match those in final sign‑off, boosting traceability. The continuous thread from model‑in‑the‑loop to HIL shortens root‑cause analysis, driving both cost and risk lower for complex electric and autonomous programmes.
Benefits of combining HIL testing in automotive with AI‑based approaches
Artificial intelligence brings pattern recognition muscle to test benches that already excel at deterministic I/O. Pairing the two lets you sweep staggeringly large parameter spaces without manual scripting. The result is more faults observed per hour and greater coverage of situations engineers might never consider during traditional reviews. Before examining specific gains, consider how statistical inference, reinforcement learning, and adaptive sampling complement HIL automotive testing topologies.
- Faster fault discovery: Machine‑learning classifiers watch signal traces in real time and flag anomalies within milliseconds, freeing engineers from chasing wide log files. The classifier ranking helps prioritise fix efforts so the team tackles high‑impact issues first.
- Scenario generation at scale: Generative models propose thousands of rare traffic scenes that still obey physics, feeding them directly into the HIL bench. This breadth exposes sensor pipelines to low‑occurrence hazards such as partially occluded signage or erratic pedestrians.
- Adaptive test sequencing: Reinforcement agents learn which input combinations are most likely to surface controller regressions, letting the bench allocate run time where it matters most. Over nights and weekends the agent refines its policy, so Monday reviews always start with fresh high‑value data.
- Predictive maintenance of the bench: Neural networks study voltage and temperature telemetry from load boxes, warning lab staff before relays or power stages drift outside tolerance. That foresight preserves measurement accuracy and reduces unplanned downtime.
- Auto‑labelling of sensor outputs: Vision transformers annotate semantic segments inside synthetic camera frames streamed from the graphics cluster, drastically reducing human labelling hours. Precise labels accelerate perception‑stack validation when fused with LiDAR and radar emulation.
- Probabilistic safety metrics: Bayesian estimators convert raw simulation counters into structured risk markers that align with ISO 26262 and UL 4600 audits. Auditors can then trace how each metric emerged from a repeatable AI‑driven campaign rather than hand‑picked scenarios.
Blending data‑hungry learning algorithms with time‑deterministic HIL benches magnifies both speed and depth of validation. Instead of choosing between statistical breadth and electrical fidelity, you secure both in one unified workflow. The synergy frees expert engineers to focus on architecture decisions while letting automated agents do the heavy lifting overnight. More covered risk categories mean fewer surprises during road tests, smoother certification discussions, and shorter routes to market.
Shorter cycles mean fewer change orders, smaller prototype fleets, and stronger statistical coverage before a single test track booking.
Key use cases for HIL automotive testing across simulation stages
HIL benches shine throughout the development life cycle, not just during final validation. Every stage benefits when the same plant model feeds the next set of design questions. The continuity avoids data re‑work and gives leadership clear line‑of‑sight from requirements to metrics. Teams often anchor budgets once they see how a single bench answers questions that normally span multiple labs.
Early concept modelling
At the sketch stage engineers want proof that high‑level control theories will behave under physics constraints. A rapid HIL setup loaded with coarse plant blocks generates delay and saturation profiles you cannot see in pure software‑in‑the‑loop loops. Those profiles inform initial requirement margins before hardware costs escalate. Because HIL testing in automotive contexts already includes hardware communication paths, early concept decisions consider bus latencies that would otherwise appear months later.
Using the bench also hard‑codes data formats that survive throughout the programme. When your team later refines the plant fidelity, interface code remains untouched, preserving schedule. The approach minimises painful refactors once suppliers deliver updated component models. Stakeholders appreciate that early capital spent on the bench stops design drift rather than adding overhead.
Algorithm maturation
Once control laws compile, the focus shifts to stability and robustness across a wide spectrum of vehicle states. HIL benches inject disturbances like tyre slip ratios, electrical ripple, or battery temperature swings while keeping timing deterministic. The deterministic schedule is important because jitter hides eigenvalue issues that only surface at precise sample offsets. With HIL automotive testing you tweak sample time, solver step, and quantisation in safe isolation from random network activity.
Engineers iterate through gain scheduling maps far more quickly than track sessions permit. Version control tools log each run so regression triage remains straightforward. Automatic report generation ties numeric margins to requirement identifiers, simplifying stakeholder sign‑off. Those artefacts later inform safety case evidence during functional safety audits.
Powertrain integration
Electric powertrains add high‑bandwidth current loops that can destabilise legacy body control networks. A bench couples controller microseconds to machine electrical millidegrees, preserving phase relationships unreachable in offline studies. Such fidelity confirms insulation coordination, fault ride‑through strategies, and thermal budgets before dyno time is booked. The result is consolidation of integration milestones across propulsion, body, and infotainment domains.
Bench data also aids supplier negotiations. Hard simulation evidence supports requests for inverter firmware updates or improved wiring looms. Suppliers respond faster when they receive structured logs rather than anecdotal reports. Programme managers see fewer over‑the‑air update cycles once physical prototypes hit the proving ground.
Sensor fusion stress tests
Advanced driver‑assistance and autonomous stacks rely on multi‑modal fusion of LiDAR, radar, ultrasonic, and camera streams. Running these channels in a closed hardware loop with the controller reveals buffering bottlenecks and memory pressure early. Packet‑level examination of MIPI or Ethernet frames verifies that timestamps survive across encoder resets. That insight shapes hardware selection long before board layouts freeze.
You can also replicate adverse lighting, fog, and partial occlusions through graphics subsystem shaders without risking test‑track assets. Such edge‑case coverage boosts machine perception metrics used in safety assessments. Importantly, the bench supports repeat runs, allowing statistical confidence rather than scattered observations. Regulators value quantitative backing when your safety case claims specific levels of operational design domain readiness.
Regulators value quantitative backing when your safety case claims specific levels of operational design domain readiness.
Regulatory homologation support
Regulators now request evidence that automated systems remain safe across electrical, functional, and cyber resilience tests. A HIL bench facilitates standardised test scripts from ISO, UN ECE, and US FMVSS modules. Because the same rig already served development, audit teams face no learning curve during witness testing. All datasets align with earlier verification artefacts, closing traceability loops.
Clear evidence builds trust not only with authorities but also with insurance underwriters. Documentation produced straight from the bench reduces manual paperwork and translation faults. When every requirement trace links back to an automatically versioned simulation run, you protect against challenges during product liability reviews. That risk reduction pays dividends throughout production and service.
Across every stage, HIL automotive testing bridges concept intent to physical performance in a single, controllable setting. The shared bench fosters data continuity, shortens feedback loops, and keeps budgets predictable. Stakeholders gain clear evidence that each requirement is met through deterministic, repeatable experiments. Such predictability is now a strategic requirement as autonomous technologies mature toward mass deployment.
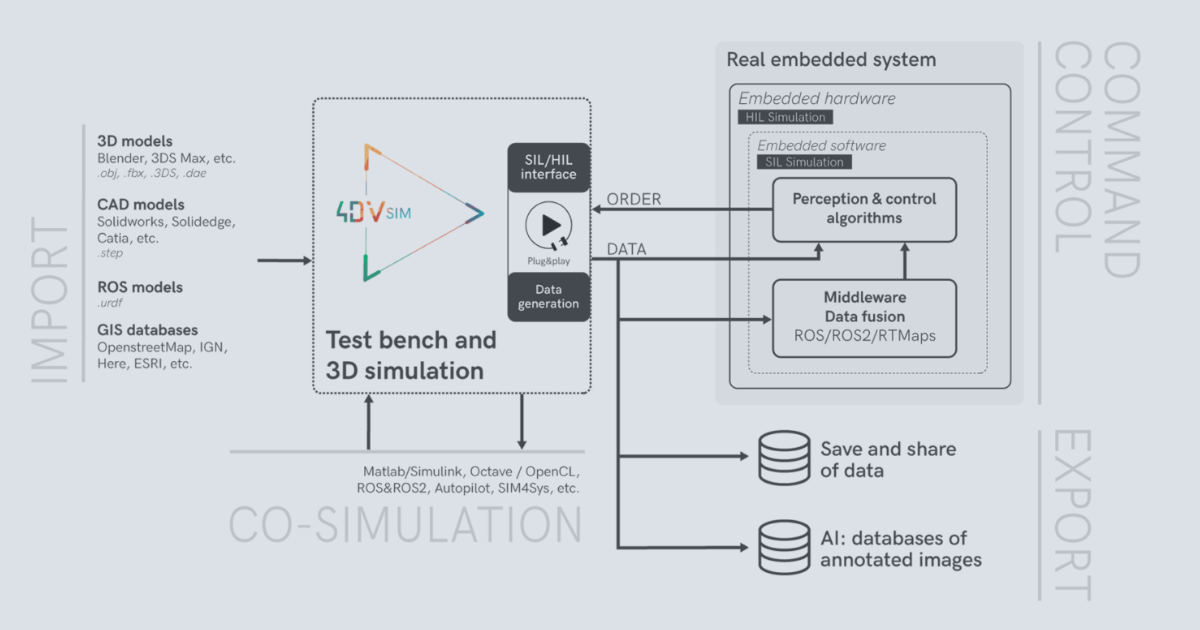
Understanding the role of an autonomous car simulator in system validation
An autonomous car simulator brings the outside traffic scene into the lab with pixel‑level fidelity and physics correctness. High‑precision dynamics solvers replicate tyre forces, weather effects, and sensor noise so that control software sees nearly the same data it would receive on public roads. Importantly, the simulator can rewind instantaneously, allowing exact reproduction of near‑miss events for root‑cause analysis. That repeatability underpins the statistical confidence needed for safety validation.
When coupled with a HIL bench, the autonomous car simulator feeds sensor channels to physical electronic control units in lockstep with real‑time clocks. Latency budgets become visible, making it straightforward to allocate processor resources or adjust perception pipelines. Engineers adjust virtual camera resolution, radar range, or LiDAR point density and immediately observe memory, bandwidth, and actuator timing impacts. Such closed‑loop insights inform hardware selection and integration planning, keeping surprises out of later track tests.
What to look for in hardware for HIL automotive testing applications
Choosing the wrong chassis or I/O card can bottleneck even the most advanced plant model. Because automotive benches juggle sub‑microsecond motor loops alongside millisecond sensor frames, hardware must balance precision with versatility. Lifecycle factors like firmware longevity and calibration stability also shape total cost. Before finalising purchase orders, consider tangible attributes that affect day‑to‑day productivity.
- Deterministic computing cores: Field‑programmable gate arrays with hard floating‑point units sustain constant step sizes even under bursty CAN traffic. That consistency keeps jitter below safety margins for torque and brake loops.
- High‑bandwidth sensor interfaces: Native support for automotive Ethernet, MIPI CSI‑2, and GMSL avoids external converters that add latency and noise. Direct capture lets the simulator push megapixel streams into perception stacks without dropped frames.
- Scalable analogue and digital I/O: Modular card cages permit quick swaps between resolver decoders, thermocouple inputs, or high‑voltage digital switches. This flexibility helps labs reuse the same rig across powertrain, body, and infotainment projects.
- Integrated fault‑injection switches: Built‑in muxes let scripts collapse sensor power lines or short communication pins on the fly. Eliminating external relays simplifies wiring and improves repeatability.
- Precision time synchronisation: IEEE 1588 PTP grand‑master capability keeps camera, LiDAR, and ECU timestamps aligned within microseconds. Tight alignment is essential for validating fusion algorithms that rely on temporal ordering.
- Thermal management and acoustic control: Low‑noise fans, conductive chassis, and finely tuned airflow maintain stable silicon temperatures in lab settings where microphone tests run. Steady temperatures reduce drift in analogue front‑end measurements and prevent unexpected throttling.
- Serviceability and calibration access: Slide‑out modules and front‑panel connectors shorten downtime for calibrations. Regular upkeep preserves measurement integrity across multi‑year programmes.
Hardware decisions influence everything from simulation fidelity to technician morale. When these qualities align, project schedules avoid unexpected delays. Your selected chassis should feel invisible during daily operation, surfacing only when you need advanced features. That transparency frees engineers to focus on modelling and results rather than lab logistics.
How autonomous vehicle simulation reduces risk in early‑stage development
Early design phases suffer from high uncertainty because decisions are made before full prototypes exist. Autonomous vehicle simulation narrows that uncertainty by revealing performance limits under controlled virtual kilometres. Replacing physical test track bookings with GPU clusters slashes cost and eliminates weather scheduling conflicts. Teams report fewer late‑stage design reversals once front‑loaded insights are available.
Concept validation under uncertainty
When engineers debate sensor stack layouts, simulation projects candidate configurations onto digital roads seeded with realistic traffic. Quick iterations reveal blind zones or redundant coverage, guiding layout decisions backed by data rather than opinion. These findings feed directly into CAD packaging so brackets, harnesses, and cooling trays suit final placement. Because no prototype parts are cut, revisions carry minimal cost.
Statistical outputs such as detection‑rate confidence intervals inform resource allocation. Management can allocate headcount to LiDAR processing or radar interference mitigation where payoffs are quantifiable. Transparent metrics keep budgets defensible in front of executives. Risk metrics shrink rapidly once concept speculation is replaced with numeric evidence.
Sensor fusion algorithm prototyping
Complex fusion filters rely on covariance tuning that is impractical to refine on public roads. Autonomous vehicle simulation feeds parameter sweeps into extended Kalman or particle filters while monitoring state divergence. Outlier cases surface parameter sets that avoid divergence without over‑smoothing. The controlled setting speeds convergence on robust filter gains.
Once gains stabilise, the same simulated data passes through signal‑injected corruption such as rain streaks or dropped Ethernet frames. Engineers observe algorithm fallbacks in a predictable sequence that aids root‑cause isolation. Corrective logic becomes part of the design rather than a late patch. Stakeholders gain confidence that perception remains resilient under harsh conditions.
Cyber‑security threat rehearsal
Connected vehicles face spoofing attempts, malformed packets, and unauthorised over‑the‑air updates. Virtual testbeds let red‑team specialists inject threats without risking fleet safety or violating regulations. Defensive software learns to detect and quarantine tampered frames while continuity of service metrics are logged. Earlier awareness of cyber gaps avoids costly recalls after launch.
Autonomous vehicle simulation scenarios can replay captured traffic from penetration tests, accelerating patch verification. Because digital twin clocks stay deterministic, diffing before‑and‑after traces proves the effectiveness of a fix. Audit artefacts generated during simulation feed directly into compliance submissions such as UNECE R155. Security becomes a design component, not a last‑minute obligation.
Safety case quantification
Regulators require statistically valid proof that automated driving features remain below significant hazard thresholds. Simulation sweeps billions of scenario permutations quicker than any physical fleet could attempt. Monte‑Carlo approaches measure functional safety target attainment at a tractable cost. Patterns in failure modes inform redundancy allocation and domain controller sizing.
Each scenario pair, such as child darting or merging traffic, receives operational design domain tags for later retrieval. Engineers package these tags with severity metrics, meeting ISO 21448 performance guidelines. Clear traceability from requirement to simulation counter keeps sign‑off time manageable. Ultimately, risk is quantified early, letting leadership commit to launch dates confidently.
Simulated mileage gathered during concept and algorithm stages slashes the number of physical prototypes needed. Clear quantification of detection, fusion, cyber, and safety margins means design freezes happen with data, not intuition. Autonomous vehicle simulation therefore, shifts risk out of late manufacturing sprints into affordable compute clusters. Projects move ahead with stronger predictability and fewer costly surprises.
Comparing autonomous vehicle simulation software for real‑time performance
The main difference between leading autonomous vehicle simulation software platforms lies in their capacity to honour strict real‑time deadlines while pushing advanced sensor physics. Platforms optimised for high‑fidelity animation sometimes abandon determinism, leading to missed deadlines on hardware benches. Other tools sacrifice rendering nuance for guaranteed step size, limiting perception validation depth. Selecting the right balance depends on your programme’s latency budget, sensor modalities, and compute resources.
| Simulation software | Physics fidelity at high frame rate | Real‑time latency guarantee (1 ms step) | Native HIL integration | Licensing approach |
| CARLA | Detailed urban LiDAR and camera rendering; open‑source asset library | Variable; typically 5–15 ms on CPU‑only, GPU acceleration improves but not deterministic | Requires external middleware for HIL coupling | Permissive open‑source |
| NVIDIA DRIVE Sim | PhysX‑based dynamics; path‑traced sensor pipelines | 1 ms achievable on dedicated DRIVE hardware; deterministic under scheduler control | Tight integration with DRIVE AGX controllers | Proprietary, hardware‑bound |
| IPG CarMaker | Physics‑based tyre and drivetrain model; moderate sensor realism | 1–2 ms deterministic on standard x86 with RTOS | Direct Ethernet and CAN interfaces for HIL | Per‑seat commercial |
| dSPACE ASM | Emphasis on control‑oriented dynamics; sensor add‑ons optional | 1 ms hard guarantee through real‑time OS and FPGAs | Native coupling with dSPACE HIL racks | Perpetual licence, module‑based |
Open‑source options like CARLA excel at scenario diversity and community‑generated assets, but additional coding is needed to bind them to HIL benches. Commercial suites such as IPG CarMaker provide turnkey real‑time schedulers, expediting deployment when deterministic performance is essential. Hardware‑optimised platforms from silicon vendors achieve unparalleled frame rates, though teams must budget for proprietary boards. Evaluating total ownership cost, integration overhead, and support maturity helps you choose a tool that complements your bench rather than fighting it.
Common engineering challenges with autonomous vehicle simulation tools
Even capable simulation stacks encounter practical snags once hardware and test requirements scale. These issues often surface only after weeks of nightly runs, stalling progress when pressure is already high. Recognising pitfalls early helps teams allocate mitigation steps before schedules slip. Engineers who understand likely hurdles can design contingency plans ahead of time.
- Asset fidelity versus GPU budget: Expanding sensor realism inflates polygon counts and shader complexity, quickly reaching GPU memory limits. Engineers must balance fidelity against consistent frame delivery to avoid missed deadlines.
- Closed‑loop latency drifts: Bursty network traffic, driver updates, and host‑OS interrupts can stretch cycle times beyond safety margins. Monitoring tools that log microsecond variance are vital for early detection.
- Version misalignment across toolchains: Minor updates to physics engines or graphics libraries may change sensor outputs, breaking comparison baselines. Strict semantic version pinning keeps historical data comparable.
- Massive data storage: Nightly perception campaigns generate terabytes of annotated frames, overwhelming network‑attached storage. Incremental compression and tiered archival policies keep storage costs manageable.
- Difficulty reproducing random seeds: Simulators often use pseudo‑random traffic actors, making it tough to replicate exact crash sequences. Saving seed values and engine versions in run metadata protects reproducibility.
- Real sensor corruption modelling: Mapping lab camera flare or LiDAR bloom into synthetic pipelines demands meticulous calibration. Without accurate artefacts, validation understates field error rates.
- Complex licence constraints: Node‑locked or hardware‑bound keys slow down cluster scaling during peak utilisation. Planning spare licences in advance avoids idle hardware.
Most of these hurdles stem from scaling trade‑offs rather than fundamental flaws in simulation technology. Proactive logging, deterministic scheduling, and solid data‑management policies avert many late‑stage surprises. Teams that treat simulations as production assets rather than ad‑hoc tools consistently report smoother validation phases. Resilience to these challenges pays off when certification audits scrutinise data lineage and timing consistency.
How OPAL‑RT supports engineers in advanced automotive simulation
OPAL‑RT marries field‑proven real‑time hardware with open software so you can build and scale benches without vendor lock‑in. Our FPGA‑accelerated cores keep one‑microsecond precision even during gigabit sensor loads, protecting control‑loop stability. RT‑LAB unifies MATLAB/Simulink, FMI, and Python models, letting you iterate plant fidelity while preserving imperial or metric scaling. Built‑in cloud connectors move overnight regression runs to high‑performance compute nodes, shortening local lab queues. Global support teams with deep automotive experience stand ready to troubleshoot timing or I/O challenges when schedules grow tight.
HIL platforms in the OPAL‑RT OP6000 and OP7000 series include modular sensor mezzanines, precision time‑sync, and automatic fault switches that align with the hardware criteria outlined earlier. AI toolboxes interface directly with the bench through Python APIs, allowing you to apply predictive sampling or anomaly detection without custom middleware. Transparent pricing models help managers forecast capital spend, while software updates remain backward compatible to sustain multi‑year programmes. Hundreds of automotive, aerospace, and academic labs rely on these solutions to ship safer code sooner, validating our commitment to performance and openness. Engineering leaders choose OPAL‑RT because proven real‑time accuracy builds trust, secures audits, and keeps projects on track.
Common Questions
What is the purpose of hardware-in-the-loop testing in automotive engineering?
Hardware-in-the-loop (HIL) testing connects real electronic control units to simulated vehicle systems to validate performance without needing full prototypes. It allows early detection of design flaws, improves regression analysis, and reduces test-track dependencies. Engineers can safely evaluate edge cases and failure scenarios under controlled conditions. OPAL‑RT platforms support this with precise, scalable benches that keep development on schedule and data audit-ready.
How do autonomous vehicle simulations improve early-stage development?
Simulation during early design phases helps teams predict how control algorithms respond to sensor data in diverse driving scenarios. This reduces reliance on physical prototypes and enables engineers to test thousands of edge cases that aren’t practical on a track. It also improves component layout decisions and software tuning before the build phase begins. OPAL‑RT makes this possible with real-time digital twins that run alongside your design iterations.
How do I choose the best HIL hardware for automotive simulation?
You need low-latency hardware with modular I/O, native sensor support, and time-synchronisation built for vehicle control loops. Deterministic behaviour under load, flexible expansion, and high data throughput are key requirements for validating ECUs and sensor fusion logic. Look for platforms that integrate seamlessly with your existing toolchains. OPAL‑RT hardware is purpose-built for these needs, helping engineers run safe, repeatable experiments with total confidence.
Why is real-time performance important in autonomous vehicle simulation software?
Real-time simulation ensures your control code is tested under strict timing constraints, reflecting what happens in the actual vehicle. If the simulator misses deadlines or introduces jitter, safety-related errors may go unnoticed during development. Maintaining timing accuracy with high-fidelity scenes is a technical challenge that not all tools solve equally. OPAL‑RT bridges this gap with real-time execution engines and integrated sensor co-simulation pipelines.
How can AI support my HIL testing workflows?
AI tools help automate scenario generation, anomaly detection, and test coverage prioritisation, accelerating simulation throughput and fault discovery. They can also auto-label sensor data, identify patterns in logs, and predict bench maintenance needs. This reduces manual workloads and boosts the efficiency of lab operations. OPAL‑RT platforms are AI-ready with open APIs to support these capabilities directly in your existing HIL setup.
Real-time solutions across every sector
Explore how OPAL-RT is transforming the world’s most advanced sectors.

Power Electronics
12 / 16 / 2025
7 Top power electronics simulation tools for engineers
Power electronics engineers use targeted simulation tools to improve modelling fidelity, de-risk controller validation, and link offline studies with real-time and hardware-in-the-loop testing.

Simulation
12 / 12 / 2025
8 reasons engineers rely on hardware in the loop systems for power electronics
Hardware in the loop testing for power electronics helps your team validate controllers earlier, study demanding grid and fault conditions safely, and build a reliable path from models to high-confidence hardware results.

Simulation
12 / 10 / 2025
9 simulation approaches supporting advanced batteries and hydrogen storage
Engineers gain a clear view of how advanced simulation strengthens energy storage innovation across batteries, hydrogen storage, and grid modernization programs.
EXata CPS has been specifically designed for real-time performance to allow studies of cyberattacks on power systems through the Communication Network layer of any size and connecting to any number of equipment for HIL and PHIL simulations. This is a discrete event simulation toolkit that considers all the inherent physics-based properties that will affect how the network (either wired or wireless) behaves.