Energy simulation tools dramatically cut building operational costs by identifying hidden inefficiencies early in the design process. Due to poor system planning, building owners, engineers, and architects often face inflated utility bills and occupant comfort issues. High-performance modeling systems address these gaps through digital prototypes that target the largest areas of energy loss. The approach often leads to reduced risk, quicker project approvals, and measurable savings throughout the life of the building.
Professionals rely on specialized software to streamline capital expenditures and manage mechanical loads with precision. Data-driven outcomes help inform design decisions, from equipment sizing to code compliance. The right simulation platform also addresses occupant well-being by analyzing daylight factors, airflow, and thermal balance. A well-planned strategy often results in higher returns on investments, meets sustainability objectives, and maintains occupant comfort.

1. HYPERSIM
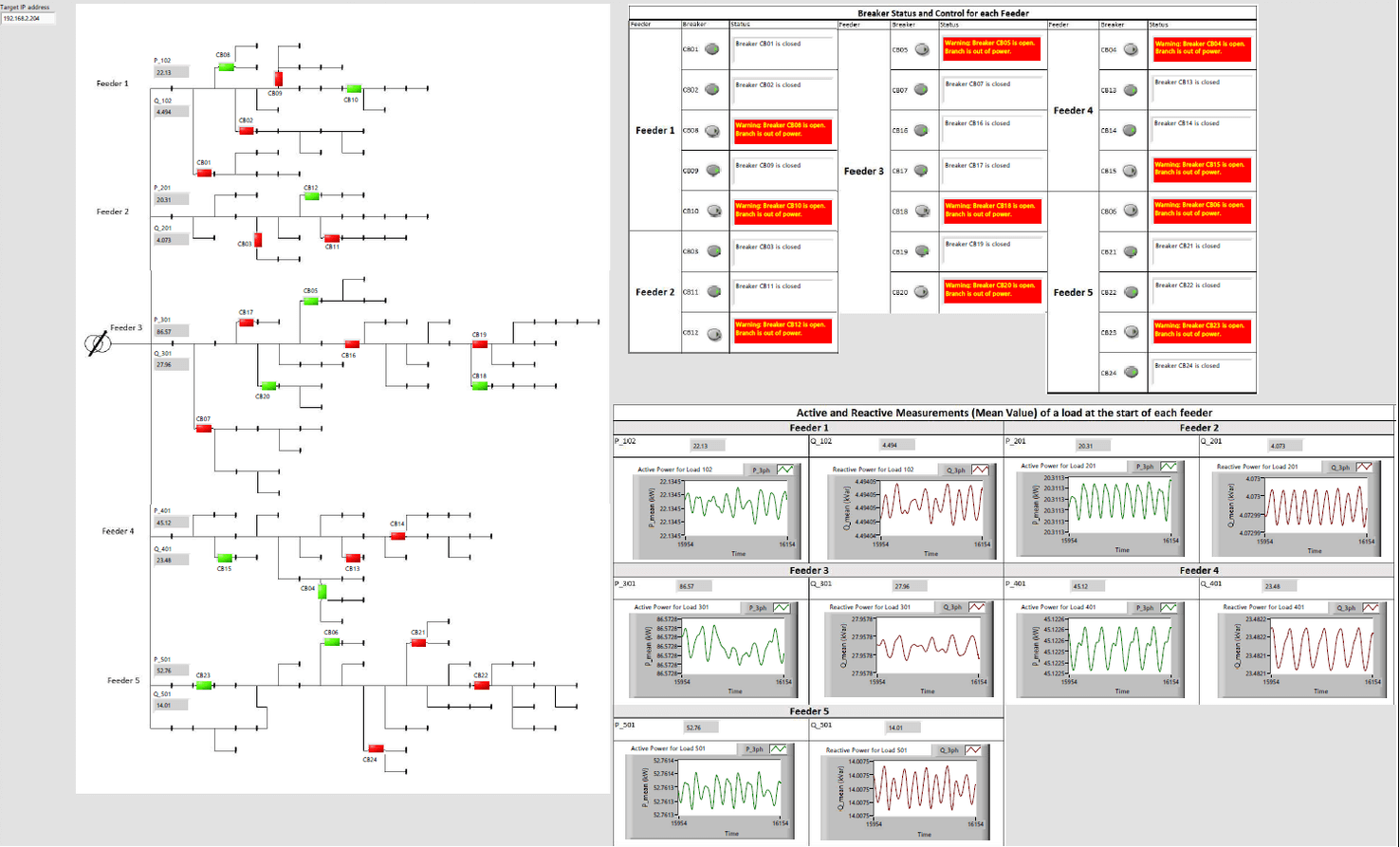
HYPERSIM is an advanced real-time simulation platform specifically designed for Hardware-in-the-Loop (HIL) testing of large, complex power systems. Engineers use HYPERSIM to simulate power grids, distributed energy resources, and microgrids, conducting detailed analyses of grid performance, reliability, and renewable energy integration. Its scalability ensures detailed studies for both small and expansive grid scenarios, helping utilities and research institutions efficiently manage power delivery and maintain stable operations.
Organizations benefit from improved integration planning, fewer operational risks, and better resource management through precise real-time validation. HYPERSIM accurately captures transient responses of grid components, clearly demonstrating how systems behave under stress conditions or unexpected disturbances. Users can easily customize grid parameters and scenarios, speeding up the process of identifying vulnerabilities or potential improvements. As renewable integration grows, HYPERSIM provides clarity and detailed validation, significantly lowering risks related to grid expansions or infrastructure upgrades.
2. ePHASORSIM
ePHASORSIM provides real-time transient stability simulation, assisting professionals in examining the dynamic behavior of electrical power systems. Teams use it to understand how grids respond to disturbances or faults, which is essential for planning and operation decisions. Integration capabilities with SCADA and EMS tools streamline scenario testing and enhance response strategies. The clarity provided by ePHASORSIM simulations helps reduce risks, improve system reliability, and simplify the management of renewable energy integration.
Engineers utilize ePHASORSIM to quickly predict system behavior under extreme scenarios, preventing costly outages or operational disruptions. The software clearly highlights areas of concern and suggests system improvements or adjustments. Detailed analyses of frequency and voltage stability further support informed operational plans, helping utilities maintain efficient service while keeping expenses manageable.
3. EnergyPlus
EnergyPlus offers an open-source platform that supports detailed calculations for cooling, heating, ventilation, and lighting. Professionals take advantage of its modular features to conduct load assessments with a high degree of accuracy and manage complex projects involving multiple zones. The software supports advanced modeling of renewable energy systems, fostering cost-effective approaches when tackling projects with ambitious energy goals. Its capabilities align well with objectives that address return on investment and scalable deployment in both new and existing buildings.
Teams often adopt EnergyPlus because it offers robust documentation and an active user base ready to share insights and technical solutions. Researchers trust its accuracy for predicting annual energy consumption thanks to its thorough system-level approach. This approach often uncovers inefficiencies early, reducing time lost on trial-and-error testing in later stages. Consistent use can help your organization spot targeted improvements that cut annual utility bills and free up resources for growth in other areas.
4. eQUEST
eQUEST leverages a user-friendly interface built on top of the DOE-2 engine, making it easier for you to analyze building performance with minimal effort. Its wizard-based setup walks users through the initial modeling steps, reducing the learning curve and aligning well with speed-to-market objectives. Inputs for building geometry, materials, and usage patterns streamline the process of identifying best-fit designs without burdening budgets. Built-in 3D visualization tools allow clear demonstrations of potential energy savings to key stakeholders.
Veteran engineers and new practitioners both benefit from eQUEST’s rapid scenario testing, which reveals operational cost trends and peak load variations. This direct comparison of various design alternatives leads to informed decisions tailored to specific requirements. The platform’s open data structure empowers advanced users to customize calculations or integrate with outside analysis scripts. This balanced flexibility can improve your decision accuracy and help you maintain alignment with budgetary and sustainability goals.
5. OpenStudio
OpenStudio streamlines energy modeling workflows by providing a set of tools and software development kits that connect to EnergyPlus. Its easy-to-use graphical interfaces simplify tasks such as geometry editing, weather data input, and HVAC system configuration. Many teams rely on OpenStudio to coordinate seamlessly with existing design software, reducing repetitive data entry and ensuring consistent modeling processes. Thorough interoperability enhances cross-disciplinary collaboration and paves the way for timely project completion.
Building owners and designers value OpenStudio’s adaptability for large-scale commercial projects and smaller residential applications. Custom measure scripting allows dynamic expansions or modifications to standard workflows, keeping operational strategies relevant for future renovations or expansions. Integration with parallel computing techniques accelerates simulations, which offers time savings during design iterations. This kind of flexible and thorough platform can lead to tangible improvements in resource allocation and occupant comfort.

6. IESVE
IESVE provides a comprehensive suite of modules covering energy analysis, daylight studies, and HVAC system evaluation. Users control detailed simulations that assess the interplay between airflow and heat transfer, making it simpler to identify performance bottlenecks. This unified approach supports early-phase conceptual decisions that reduce surprise costs once construction is underway. The wide range of integrated features helps ensure that your organization experiences fewer retrofit expenses and smoother transitions from design to operation.
Consultants often employ IESVE to develop reliable energy certifications and code compliance reports. Its advanced algorithms facilitate thorough occupant comfort evaluations, from temperature distributions to indoor air quality simulations. That level of clarity reduces guesswork and fosters stakeholder alignment on budgets, timelines, and quality targets. Comprehensive data analysis positions you to present measurable gains to investors or partners, ultimately highlighting the platform’s contribution to value-oriented decisions.
7. DesignBuilder
DesignBuilder offers a visually appealing interface that combines robust EnergyPlus-driven simulations with user-friendly modeling workflows. Architectural teams map out geometry, construction layers, and mechanical systems through drag-and-drop features, which can cut data entry errors and accelerate design cycles. Built-in optimization tools compare energy usage across various design alternatives, providing tangible estimates for operational expenses. This proactive strategy lets you identify hidden inefficiencies before committing capital to large-scale installations.
Engineers value DesignBuilder’s ability to run advanced analyses such as computational fluid dynamics (CFD) within the same environment, avoiding extra software or time-consuming data transfers. That integration speeds up the process of refining mechanical system specifications and occupant comfort settings. The software also simplifies compliance reporting for codes and standards by offering standardized output formats. Clear and timely analysis results can position you to stay on schedule, cut operating costs, and allocate resources toward profitable expansions.
8. Green Building Studio
Green Building Studio, powered by cloud services, accelerates performance evaluations and high-level energy assessments. Architectural firms upload initial building models to the platform, letting it run simulations against various metrics like energy consumption, water usage, and carbon footprint. Those results inform adjustments such as glazing ratios or HVAC system tweaks, ensuring your final design aligns with sustainability targets. Built-in cost forecasting estimates long-term operational expenses, supporting better planning and stakeholder confidence.
Teams often integrate Green Building Studio with established design tools, improving collaboration between architects and energy analysts. Automatic weather data retrieval eliminates the need for manual file transfers or complex setups, saving time for more strategic efforts. The platform’s cost analysis features shed light on return-on-investment calculations, which is key when balancing upfront construction expenses against ongoing energy bills. This approach helps you secure management buy-in by highlighting quantifiable performance gains.
9. TRNSYS
TRNSYS operates as a flexible simulation environment that supports both simple and detailed projects. Its modular nature encourages you to select components from a library of HVAC systems, renewable technologies, and building materials. These components connect in a flow diagram, making it straightforward to test a broad range of scenarios without extensive reconfiguration. That adaptability aligns well with cost-conscious projects or those with unique mechanical system requirements.
Engineers often rely on TRNSYS for dynamic performance assessments, spanning minute-by-minute evaluations and full annual cycles. The software’s focus on system-level interactions delivers deeper insights into energy flows, which supports accurate cost planning. Integration with external tools for data processing or result visualization expands its use for large or complex designs. Thorough, step-by-step simulations offer heightened transparency, which helps you justify specific choices for maximum investor returns.

10. RT-LAB
RT-LAB is a distributed real-time simulation environment built to handle complex energy systems, including energy storage and microgrids. Teams benefit from parallel computing capabilities, significantly speeding up simulation times. Its scalability allows accurate system-level validation, reducing operational uncertainties and supporting efficient grid integration. Engineers use RT-LAB to quickly configure sophisticated test scenarios, ensuring robust system responses even in highly complex or unusual operating conditions.
RT-LAB clearly visualizes dynamic interactions among grid components, improving understanding of how storage systems and renewables impact overall grid stability. Its versatile modeling framework accommodates rapid adjustments, saving resources and accelerating innovation in system design. Organizations significantly reduce project timelines and operational risks, thanks to RT-LAB’s detailed simulations and clear performance insights.
11. TRACE
TRACE focuses on evaluating HVAC systems and their performance in commercial, institutional, and industrial spaces. Its specialized modules allow you to analyze loads, size equipment, and compare different mechanical system designs. This targeted approach reduces the risk of oversizing or undersizing HVAC components, which can waste capital or lead to occupant discomfort. Users also look to TRACE for simplified compliance reporting aligned with certain codes and energy standards.
Energy modelers appreciate the platform’s straightforward interface and capacity for refining air handling and chiller plant configurations. Accurate load calculations provide consistent results that inform real-time cost and capacity evaluations. Designers benefit from advanced features that predict how retrofits or expansions might affect operational budgets. Having immediate access to these insights helps you optimize system choices for balanced comfort, cost, and performance.
“Energy simulation tools dramatically cut building operational costs by identifying hidden inefficiencies early in the design process.”
12. HAP
HAP, from a well-known HVAC manufacturer, delivers heating and cooling load calculations along with in-depth system sizing. Its functionalities align particularly well with commercial structures that feature complex heating and cooling demands. The software’s step-by-step approach helps you specify design assumptions like building shape, wall properties, and equipment performance, enabling quick comparisons of varied design scenarios. Graphical outputs of energy usage summaries add clarity during client presentations.
Those who adopt HAP reduce the chances of resource misallocation because the software precisely calculates the loads required to keep spaces comfortable. This accuracy can result in better system design, cutting both short-term and long-term operating costs. The platform’s library of real product data ensures close alignment with actual equipment performance, which can limit guesswork or margin of error. That consistency supports timely decision processes and fosters alignment among architects, mechanical designers, and owners.
13. EnergyPro
EnergyPro stands out for its compliance-focused approach, helping designers and builders meet local or regional standards. Its straightforward interface organizes inputs for building envelopes, HVAC systems, and lighting setups, leading to faster model creation. The platform also includes powerful algorithms to estimate time-dependent valuation of energy, which reveals cost variations during different operating periods. This clarity offers the chance to plan payback strategies aligned with occupant schedules or utility pricing tiers.
Architects appreciate EnergyPro’s integrated daylighting analysis, which contributes to occupant wellness and lowers artificial lighting demands. EnergyPro’s frequent updates help keep pace with emerging building codes or standards, so your project remains aligned with legal requirements. This dependable compliance coverage reduces the risk of delayed certifications, which can disrupt schedules or budgets. Because it captures both energy modeling and code adherence, the tool helps you streamline your route from design to occupancy with fewer administrative hurdles.
14. Toolboxes
OPAL-RT provides specialized simulation toolboxes, including ARTEMiS (CPU-based electrical analysis) and eHS (FPGA-based power electronics simulations). These expand simulation capabilities for detailed energy system testing and validation. Teams achieve precise analysis results quickly, improving energy efficiency strategies and integration of advanced technologies into existing grid infrastructure. The ARTEMiS toolbox clearly manages complex electrical network simulations, speeding up accurate fault detection and analysis.
Meanwhile, the eHS toolbox accurately models fast-switching power electronics, essential for validating advanced inverter and converter systems used in renewable energy integration. Engineers rely on these toolboxes to efficiently validate component-level designs, significantly improving accuracy and reducing resource usage during testing phases. The simplicity and clarity of these simulation results ensure technical decisions are well-informed, resulting in higher system reliability and streamlined integration processes.
15. HEED
HEED, short for Home Energy Efficient Design, offers a specialized focus on residential buildings. It walks you through an intuitive model setup that includes geometry and basic construction data, making it approachable for users less experienced in simulation. Visual dashboards make it simpler to evaluate how changes in window design, shading, or insulation might affect energy bills. This straightforward process supports faster project turnaround and better clarity for homeowners or building contractors.
HEED’s emphasis on quick comparative analysis helps your team lock in design improvements without extensive trial and error. Many adopt HEED for its readiness to produce 2D and 3D representations of predicted energy flows, adding visual weight to project pitches. The software aims to strike a balance between advanced capabilities and user-friendly navigation, saving time and money typically spent on more complex modeling tasks. This approach improves homeowner satisfaction by validating strategies for lower monthly costs and increased comfort.
16. REM/Rate
REM/Rate concentrates on residential energy modeling and rating, typically used by professionals seeking certification under recognized programs. Its modules support detailed envelope descriptions, HVAC equipment data, and even renewable add-ons like solar photovoltaic systems. The software aligns well with cost-focused builders who aim to prove efficiency metrics to potential buyers or meet certain mortgage incentive requirements. Input categories mirror real-world construction practices, eliminating confusion that sometimes arises with generic modeling suites.
Assessors rely on REM/Rate to generate standardized reports that clarify a home’s compliance with specific rating systems. This documentation is often key for marketing homes with proven efficiency or for qualifying projects for government-backed incentives. Both new builds and retrofits can benefit from the software’s scenario testing, which examines how different materials or mechanical setups affect performance. Accurate modeling fosters transparent communication, ensuring that you can secure financial support and occupant buy-in more easily.
17. PHPP
PHPP, or the Passive House Planning Package, focuses on rigorous efficiency criteria that aim to reduce heat loss and optimize building insulation. The software has a spreadsheet-based layout that systematically reviews the core elements impacting thermal performance. Designers often use it to achieve stringent Passive House standards, minimizing reliance on traditional heating or cooling systems. This targeted approach can lower operational costs significantly while promoting consistent occupant comfort.
Efforts guided by PHPP usually incorporate high-quality windows, advanced ventilation technology, and thick insulation. PHPP’s step-by-step data entry ensures these components meet specific thresholds and helps prevent oversights that might lead to poor performance. The consistent methodology also speeds up the certification process for Passive House or other sustainability labels. That consistency gives you an edge when presenting projects to investors interested in long-term savings and minimal carbon footprints.
18. Cove.Tool
Cove.Tool merges parametric modeling with rapid cloud-based simulations to propose cost-efficient designs. Its primary interface simplifies geometry input and automatically configures baseline assumptions, reducing the overhead of manual data handling. The platform then runs quick iterations to compare different design variables such as window-to-wall ratios, materials, and shading options. That real-time feedback mechanism reveals lower-cost routes to achieve ambitious performance benchmarks.
Engineers and designers often connect with Cove.Tool with existing workflows to study multiple design options in parallel. This approach uncovers potential improvements that might otherwise remain hidden until late in construction, saving labor and capital expenditures. Dynamic cost estimates for various efficiency strategies can support early stakeholder engagement, ensuring alignment on budget and performance targets. The tool’s emphasis on iterative analysis empowers your team to incorporate frequent feedback loops that drive measurable savings over the building’s lifecycle.
19. Sefaira
Sefaira integrates performance modeling directly into 3D design software, encouraging real-time checks on energy usage as you modify building elements. Its fast calculation engine yields results regarding daylighting, heating, cooling, and ventilation needs. Building professionals rely on Sefaira to visualize the impact of design refinements, which makes it easier to communicate benefits to clients or collaborators. The automated comparison features let you weigh different strategies without the usual time-intensive manual processes.
The software’s synergy with design platforms often shortens project timelines by minimizing data translation or duplication errors. Using straightforward graphics, Sefaira underscores areas ripe for efficiency gains, guiding you toward cost-effective choices. Detailed results highlight essential metrics like kilowatt-hour savings or occupant comfort improvements in a way that’s accessible for both technical and non-technical teams. This clarity can boost confidence in final designs and mitigate risk by ensuring that selected features yield tangible energy and cost benefits.
20. ClimateStudio
ClimateStudio specializes in daylight and thermal comfort analysis, delivering immediate feedback on window performance, glare risk, and occupant well-being. Designers incorporate these insights to refine shading devices or choose the most effective fenestration for controlling heat gain. The software integrates easily with popular modeling platforms, allowing you to compare different building shapes or façade treatments. This iterative process helps you limit complications later, such as occupant complaints about glare or excessive heat buildup.
Analysts appreciate ClimateStudio’s speed, which transforms design tasks that once took days into near-instant assessments. The advanced visualization outputs can demonstrate projected comfort levels across rooms, floors, or entire complexes. Facility owners leverage these findings to optimize energy budgets while still maintaining occupant satisfaction. This targeted approach strengthens the business case for well-lit, comfortable spaces that reduce lighting and HVAC demands over the long haul.
“EnergyPro stands out for its compliance-focused approach, helping designers and builders meet local or regional standards.”
21. Radiance
Radiance stands out for its detailed lighting and daylighting calculations, widely respected among architects and research institutions. Its physics-based rendering engine produces accurate visualizations of how light interacts with complex geometries and materials. That level of precision guides you to better decisions on window placements and interior finishes, which ultimately reduces reliance on artificial lighting. Project teams deploying Radiance often experience fewer surprises around occupant comfort or code compliance related to daylight access.
Although Radiance frequently operates via command-line tools, various interfaces enable professionals to integrate it into standard design pipelines. This structure suits large projects that need high-fidelity lighting simulations for essential tasks like occupant safety, productivity, or code-required daylighting thresholds. Its thorough calculations provide data on illuminance, glare probability, and color rendering, leading to balanced design solutions. The outcome is consistent lighting quality and resource efficiency that yield lower operating costs and improved occupant experiences.
22. RETScreen Expert
RETScreen Expert focuses on clean energy project analysis, offering a wide scope that covers buildings, power plants, and industrial processes. The software simplifies the financial evaluation of energy efficiency initiatives by calculating internal rate of return (IRR), payback periods, and risk parameters. Teams lean on RETScreen to pinpoint the energy generation potential of solar, wind, or combined heat and power systems, mapping out the best steps for feasible integration. This high-level approach improves your ability to define strategies that fit tight budgets or short timelines.
Many government agencies and private firms favor RETScreen Expert because it includes validated data on climate conditions and technology performance. Built-in benchmarks help you gauge how well your project stands against typical industry results, clarifying which improvements merit further attention. The software’s transparency bolsters stakeholder trust, as it plainly shows potential cost savings or revenue streams from renewable systems. This clarity accelerates project approvals and fosters more decisive investment in clean, reliable energy solutions.
23. CAN-QUEST
CAN-QUEST is a specialized tool used largely for modeling buildings in Canadian climates, aligning with national energy codes and standards. Its features cover envelope design, HVAC, and lighting calculations with a focus on compliance metrics. This alignment reduces the time spent on manual cross-checking of regulatory requirements, helping your team keep projects on schedule. The software’s structured data inputs limit errors that might otherwise compromise official approvals or certifications.
Design professionals appreciate CAN-QUEST for generating straightforward reports that verify new or renovated buildings against code benchmarks. The tool provides insights into potential savings on heating and cooling, which is especially relevant given Canada’s wide range of climatic zones. Engineers and architects can then refine designs based on real-world data, improving occupant comfort and operational efficiency. This clarity of purpose supports both budget forecasting and long-term environmental responsibility.
24. EE4
EE4 evaluates building performance in a manner tailored to specific regulatory criteria, especially in regions that demand proof of energy code compliance. Planners often use the platform to estimate energy intensity and visualize how proposed materials or mechanical systems stack up against norms. This comparison can drive modifications that lower utility costs and achieve compliance without major redesigns. The detailed modeling steps produce results that are acceptable to various reviewing agencies.
The interface encourages iterative changes, ensuring that you can test alternatives quickly and refine approaches if something proves too costly or underperforms. Another advantage is the software’s capacity to handle complex building forms or large facilities, so you’re not restricted to basic prototypes. EE4’s methodical calculations translate to fewer project delays because required documentation can be produced more reliably. That level of consistency supports efficient code approvals and fosters alignment between architects, engineers, and owners.
25. COMcheck
COMcheck is a user-friendly tool that validates if building envelopes, HVAC components, and lighting designs meet particular energy codes. The software’s guided approach breaks the compliance process into clear steps, saving you from guesswork or complicated reference tables. Because it covers multiple states or regions, it can be applied to diverse projects without resorting to separate tools. This universal perspective eases tasks for firms that manage construction across different jurisdictions.
The platform generates compliance certificates that prove conformance to codes, which is necessary for securing permits. This single-step approach cuts back on the back-and-forth communication between design teams and regulatory bodies. Clear pass/fail reports highlight which categories still need revisions, directing resources to the right places for maximum impact. That transparency helps you shorten lead times and protect budgets from unexpected rework costs during late-stage construction checks.
26. BEopt
BEopt, developed primarily for residential energy modeling, tackles whole-building optimization in a structured, iterative manner. Users set performance targets and constraints, then the software automatically tests various designs, technologies, and material options to pinpoint the best outcomes. This automated search eliminates time-consuming guesswork and reveals combinations that might otherwise go unnoticed. The direct link between energy efficiency and financial payback clarifies your roadmap for cost-effective construction.
Designers who integrate BEopt early often achieve better alignment with occupant needs and local building codes. The dynamic exploration of different envelope materials or mechanical systems provides a realistic outlook on utility bills. BEopt also features robust data analysis charts, allowing for side-by-side comparisons of investment costs and resulting savings. This clear perspective promotes strategic decisions that reduce operational expenses and give stakeholders greater confidence in the project’s long-term value.
Benefits of Using Energy Simulation Tools
Building projects gain speed and clarity through digital models that highlight critical savings opportunities. Teams can evaluate different materials, HVAC configurations, or layout plans without the financial risks tied to physical prototypes. Early insights reduce on-site surprises, cut wasted budgets, and align everyone on a clear path toward better outcomes. Many organizations view these tools as an essential strategy to remain cost-efficient and adapt quickly in the face of shifting project goals.
- Lower utility costs: Accurate projections ensure that you can fine-tune equipment and insulation levels to save money over the building’s life.
- Reduced design errors: In-depth simulations catch potential performance flaws early, limiting expensive changes once construction is underway.
- Enhanced occupant comfort: Detailed modeling of lighting, airflow, and thermal balance leads to healthier indoor conditions.
- More confident stakeholder alignment: Data-driven results simplify presentations for investors, clients, or regulatory bodies.
- Faster time to market: Clear performance targets streamline procurement and reduce rework, bringing projects online more swiftly.
- Better return on investment: Predictive results point to strategies with higher payback, ensuring that limited capital is allocated wisely.
- Scalable growth potential: Tools that handle both small and large designs help businesses expand without repeatedly changing platforms.
Energy simulation tools also encourage deeper collaboration among architects, engineers, and facility managers by providing a single source of truth. Joint reviews of model outputs can resolve conflicts before they escalate into budgeting or scheduling issues. Through iterative testing, teams can chart a course that meets project milestones and satisfies certifications. This focus on informed planning places organizations on a trajectory of consistent returns and ongoing innovation in resource efficiency.
Selecting the Best Energy Simulation Software for Your Needs
The primary consideration often revolves around project scale and complexity. Smaller residential efforts may benefit from tools with preset libraries and straightforward user interfaces. On the other hand, large commercial or industrial projects typically demand software with advanced features for HVAC load calculations, renewable integrations, or parametric optimization. These capabilities save time by running multiple simulations in parallel and clarifying which strategies yield the highest payoffs.
Sophisticated building designs that target efficiency and occupant wellness rely heavily on accurate modeling. Each energy simulation platform addresses a specific set of performance goals, from compliance reporting to real-time load analysis, and each one brings unique benefits to project teams that prioritize measurable business impact. Whether the focus is on quick scenario testing or detailed parametric studies, these 22 options represent a broad cross-section of possibilities for improving building performance, lowering maintenance costs, and staying ahead of rising operational demands. Sound choices at the design stage often translate to years of stable, predictable expenditures and satisfied occupants, creating a solid foundation for future endeavors.
Engineers and innovators across industries are turning to real-time simulation to accelerate development, reduce risk, and push the boundaries of what’s possible. At OPAL-RT, we bring decades of expertise and a passion for innovation to deliver the most open, scalable, and high-performance simulation solutions in the industry. From Hardware-in-the-Loop testing to AI-enabled cloud simulation, our platforms empower you to design, test, and validate with confidence.
Frequently Asked Questions
What are the main advantages of energy simulation tools for commercial buildings?
They allow engineers to test multiple scenarios without guesswork, saving time and reducing capital risks. These platforms also support occupant comfort by optimizing HVAC loads, lighting, and ventilation in line with operational goals.
How does an energy simulation software list help in finding the best options?
It provides a quick overview of various platforms, highlighting specialized features for specific tasks such as load calculations or compliance reporting. This approach clarifies which software aligns with your needs across residential or large commercial projects.
What is the best energy simulation software for small-scale homes?
Residential projects often benefit from simpler interfaces and libraries tailored to home construction. Tools that focus on single-family houses or small multi-unit structures streamline workflows, ensuring you invest time and resources wisely.
How do these tools assist with budgeting and resource allocation?
Many platforms predict operational costs, evaluate return on investment, and show potential payback periods for planned improvements. Clear financial insights guide decisions that boost efficiency while helping owners track outcomes more effectively.
Can energy simulation tools support design updates after a building is already operational?
Retrofitting strategies gain clarity through post-occupancy data and new system configurations tested in digital models. This process helps reveal cost-effective changes, from adding insulation to revising HVAC controls, for a more sustainable and profitable operation.